
Flexible lab automation川崎重工が提供するロボットによる自由自在なラボオートメーション
Problems
ラボフェーズにおける課題を
川崎重工の技術力で解決
作業負荷が高い
取り扱う試薬は危険性も高く、研究者への作業負荷が高い。労働人口減少により次世代の担い手が減少傾向にある。
品質のばらつき
正確性を要する実験作業は、研究者による手技のばらつきが大きく、品質のばらつきにもつながる。
曝露による人体被害
医療従事者は長期間にわたり複数の抗がん剤に曝露する可能性が高く、健康被害の可能性が懸念されている。
川崎重工が自由自在
な
ラボオートメーションをご提案

作業効率化
試薬や検体を必要なタイミングで装置へ供給。また排出、次工程への移載も可能。無人化・省人化・24時間稼働。
品質安定
ロボットにより手技バラつきを解消。パラメータによるデータ管理および技術移管が可能。
曝露防止
無人化により高活性物・危険物環境での作業から解放。
Kawasaki Lab automation 1
川崎重工が独自に手掛けるラボオートメーション1では、必要なモジュールを設定したシステム構築が可能です。
また、先々のモジュール追加およびレイアウト変更も柔軟に対応できます。
これによりクリーン環境対応のロボットおよび走行レールなど川崎重工の幅広い製品を使用頂くことで、
細胞培養や分析工程の自動化を提案させて頂きます。

手技のばらつきをなくし、
お客様ごとのシステムをカスタマイズ
川崎重工の


既存システムとロボットシステムの通信 |
 |
トレーサビリティ(分注量) |
|
システムの拡張性 |
|
除染対応 |
|
アイソレータ |
|
サポート(リモート・保守) |
|
| タクト | |
カワサキ独自のアプリケーションで
自由な組み合わせが可能
KHIアプリケーションで
組み合わせが変わる様子

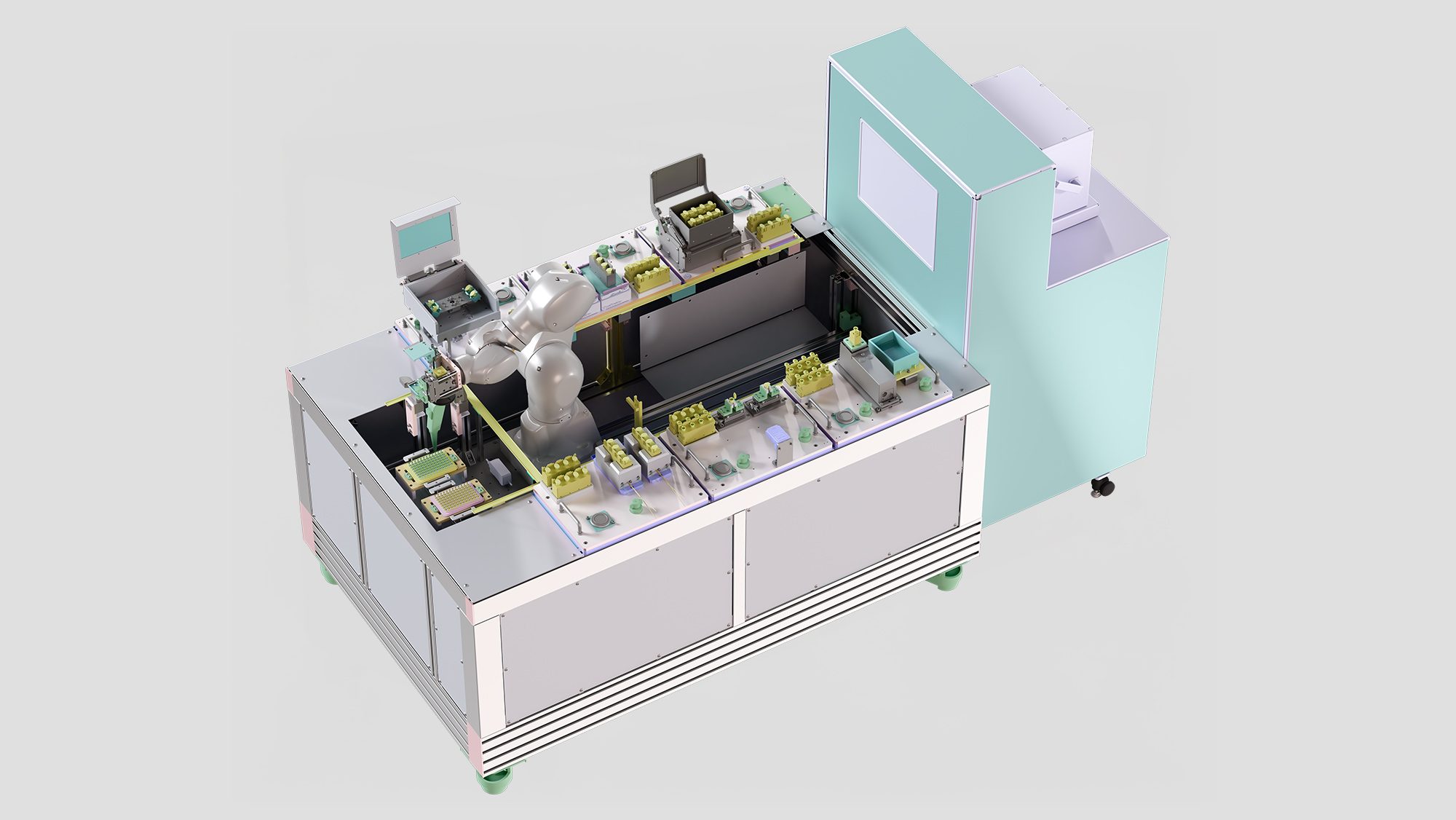
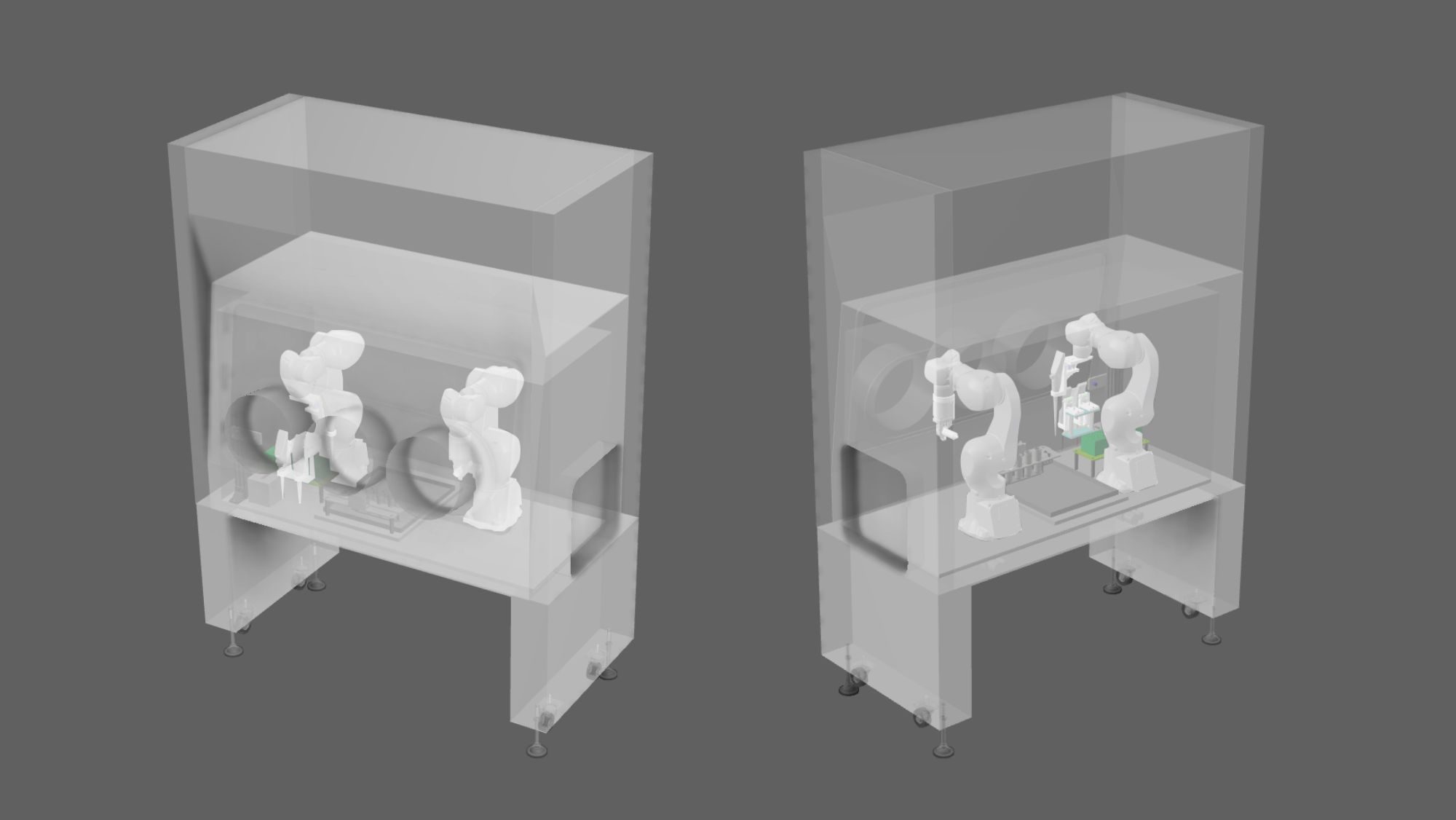
Kawasaki Lab automation 2
Kawasaki Lab automation 2では、クリーンベンチにロボット2台が稼働するシステムとPoC確立のための研究開発を支援しております。
6軸ロボット×2台の連携作業で付帯設備を削減することができ、
ハンドツールおよび作業台の構成を変更することで別用途のリユースが可能になります。
手技によるばらつきをなくし、
分注や剥離など異なる作業を
実施することが可能
.
製品・サービスの詳細内容をお知りになりたい方は
下記よりお問い合わせください。
Spec Kawasakiが手掛ける医薬ロボット MCシリーズ
約300台と豊富な販売実績を誇る、MCシリーズのロボットは製薬、創薬の現場で、微生物混入、作業者の被爆リスクをなくし、
作業効率化を実現しています。ISO クラス5(Fedクラス 100)の清浄度を実現し、狭いスペースでも柔軟な動作が可能です。
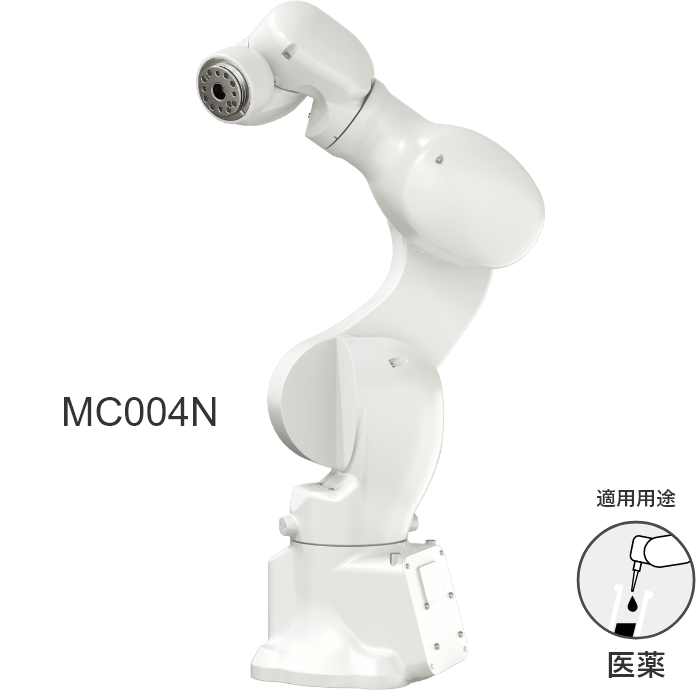
MCシリーズ
耐薬液性の高い表面コーティング処理したアーム。
VHP(過酸化水素ガス)滅菌に対応。
| 構造 | 垂直多関節 | |
|---|---|---|
| 自由度(軸) | 6 | |
| 最大可搬質量(kg) | 4 | |
| 最大リーチ(mm) | 505.8 | |
| 位置繰り返し精度*1(mm) | ±0.028 | |
| 動作範囲( °) | 腕旋回(JT1) | ±180 |
| 腕前後(JT2) | +135 – −90 | |
| 腕上下(JT3) | +60 – −155 | |
| 手首回転(JT4) | ±270 | |
| 手首曲げ(JT5) | ±120 | |
| 手首捻り(JT6) | ±270 | |
| 最大速度(°/s) | 腕旋回(JT1) | 200 |
| 腕前後(JT2) | 180 | |
| 腕上下(JT3) | 225 | |
| 手首回転(JT4) | 700 | |
| 手首曲げ(JT5) | 500 | |
| 手首捻り(JT6) | 350 | |
| 許容モーメント(N・m) | 手首回転(JT4) | 8.5 |
| 手首曲げ(JT5) | 8.5 | |
| 手首捻り(JT6) | 4.0 | |
| 許容慣性モーメント(kg・m2) | 手首回転(JT4) | 0.2 |
| 手首曲げ(JT5) | 0.2 | |
| 手首捻り(JT6) | 0.1 | |
| 本体質量(kg) | 25 | |
| 設置方式 | 床置き、天吊り | |
| 設置環境 | 周囲温度(℃) | 10 – 35 |
| 相対湿度(%) | 35 – 85(但し、結露なきこと) | |
| 保護等級*2 | 手首:IP67相当 基軸:IP65相当 | |
| 対応コントローラ/電源容量 | F60/2.0kVA | |
医薬ロボットによる薬剤調製作業の自動化
製品・サービスの詳細内容をお知りになりたい方は
下記よりお問い合わせください。
Questions こんな作業も自動化できます! よくあるご質問
通信が確立できるモジュールであればどんなものでも組合せ可能です。
ご自身のパソコンや、装置に備え付けの画面でご自由にプロトコルを変更頂くことが可能です。
はい、ご必要な場合は対応可能です。お気軽にご相談をお願いいたします。
Case 医薬ロボット ラボオートメーション 導入事例
短期間で自動PCR検査ロボットシステムの立上げに成功
川崎重工とシスメックス株式会社、株式会社メディカロイドの3社は、新型コロナウィルスによる感染リスクから医療従事者を守るとともに、本格的な経済復興に向けた人の流動化を大きな社会要請と認識し、「短時間、大量、高精度」の特徴を有する自動PCR検査ロボットシステムの開発・検証・社会実装を実施。当社PCR検査システムによる検査能力の拡充により、社会経済活動の早期回復に貢献すべく、PCR検査事業に取り組んでまいりました。
導入事例を見る
湯山製作所様へ医薬ロボットを導入、培養作業の自動化を実現
人手不足が課題となっている医療現場にソリューションを提供し続ける会社「湯山製作所」は散薬の分包機を始めとした調剤機器を中心に、各種薬剤業務を支援するシステム及び設備や、電子カルテ・滅菌器などの診療所向け製品を医療現場に届けています。 今回はそんな湯山製作所が薬剤調整の自動化を実現するべく開発した抗がん薬混合調整ロボットChemoRo(ケモロ)と開発の立役者となった川崎重工の医薬用ロボットの導入事例をご紹介いたします。
導入事例を見る
 を活用した工程間搬送のご紹介
を活用した工程間搬送のご紹介
川崎重工の製品であるTRanbo-7は工程間を自由自在に走行する、自走式ロボットです。
試薬や検体を離れた場所でも自走式ロボットが搬送することで、
無人で24時間稼働することができる次世代のラボオートメーションシステムを目指します。
TRanbo-7の実際の動作をご確認ください。