

曲⾯にも柔軟に対応します
外観検査でこんな
お悩みはありませんか
検査員が慢性的に
不⾜している
検査技術を持つ人材が限られる。
人手不足で日々の生産に支障がでる。
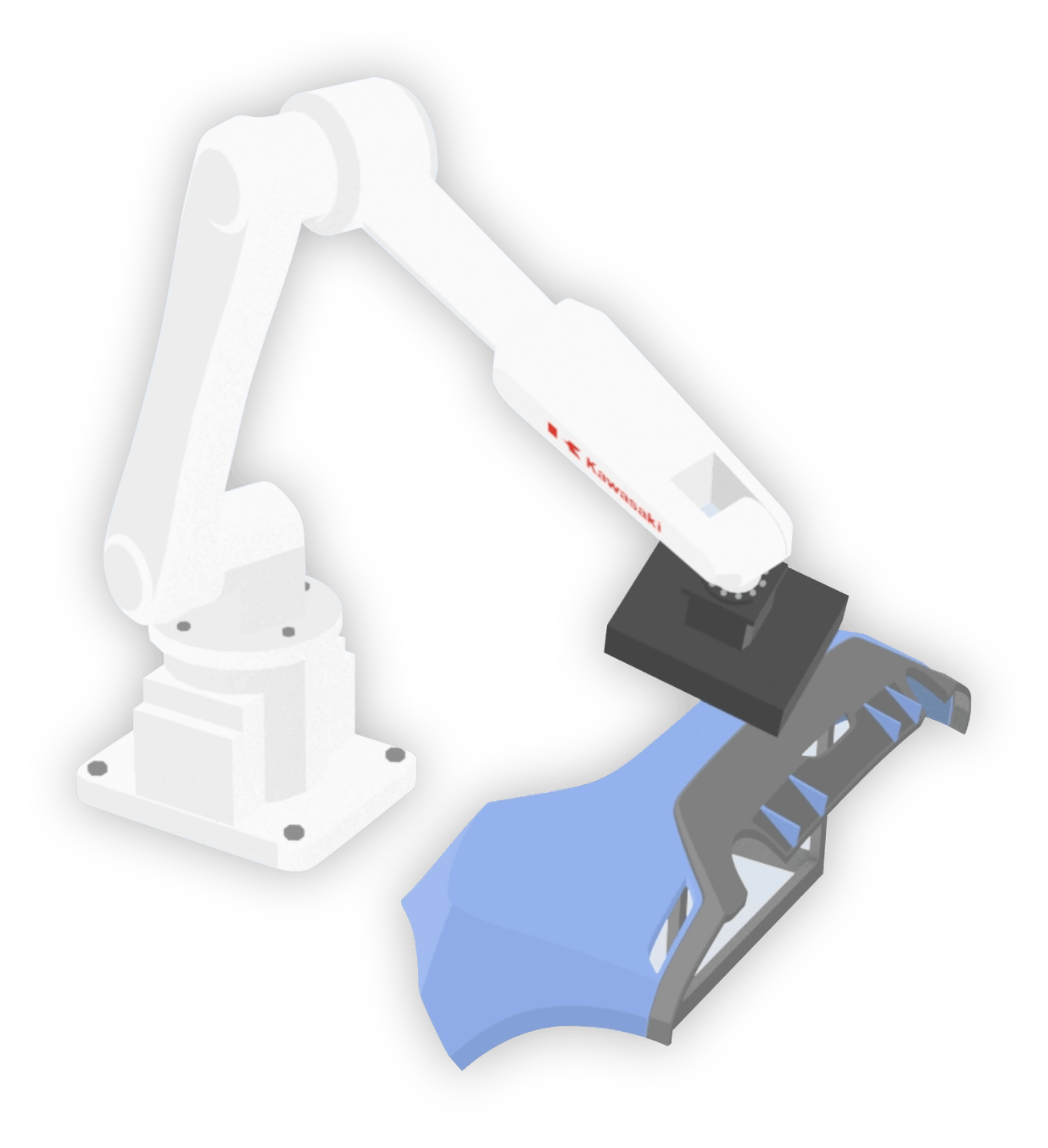
ロボット×カメラが
検査
人の代わりにロボットとカメラが検査するため、作業員の技術力に依存することがなく、急な欠員などによる不測の事態も回避できます。
検査品質に
バラつきがある
目視検査時に人によって基準が異なることにより、歩留まりの低下が発生。
歩留まり向上と
品質の安定化
ロボットシステム導入による検査品質の安定化を実現することで、予測可能なライン運営が可能になります。また、検査基準のバラつきが減り、歩留まり向上につながります。
部品が多く、
専⽤機が使えない
部品毎に対応した専用機が必要。
設備が複雑・大型化され高価になる。
ロボット1台で
対応可能
自由度の高い6軸ロボットを使う事で、あらゆる部品の変更に対応します。また、ティーチングも少なく済むため立ち上げ期間も短縮できます。
カワサキロボットの
「⾼速外観検査」
なら解決できます
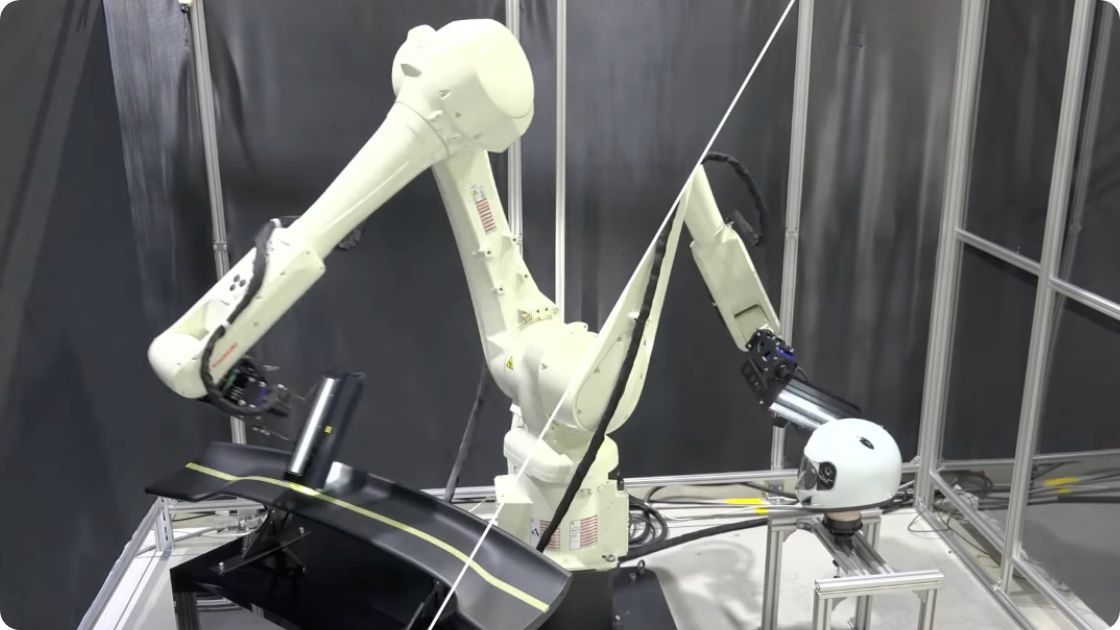
川崎重工独自の
「走査型外観検査」で
高速化を実現
従来技術では撮像が狭いエリアしかできず、
検査に⻑時間を要したため
自動化が進みませんでしたが、
新開発の高速パルス出力機能により
製品表面を高速で移動しながら高速撮像が可能に。
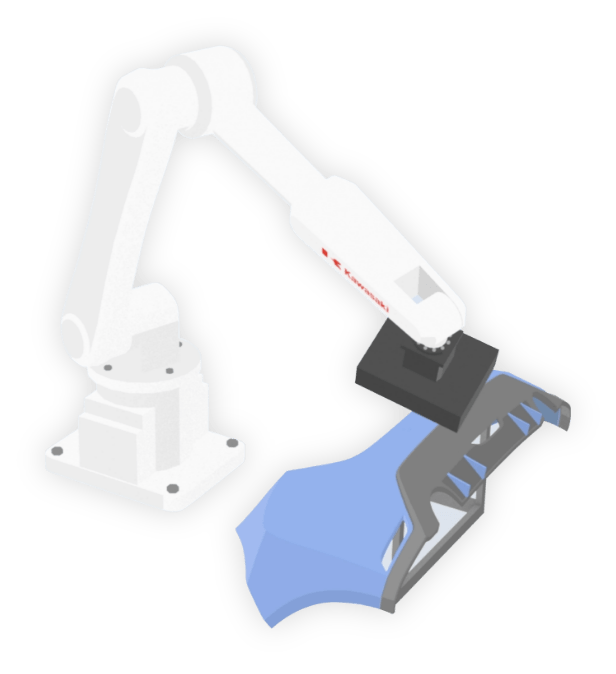
川崎重工の走査型検査システムは曲面を
止まらず! 速く! 正確に!
検査することが可能です。
高速パルス出力機能
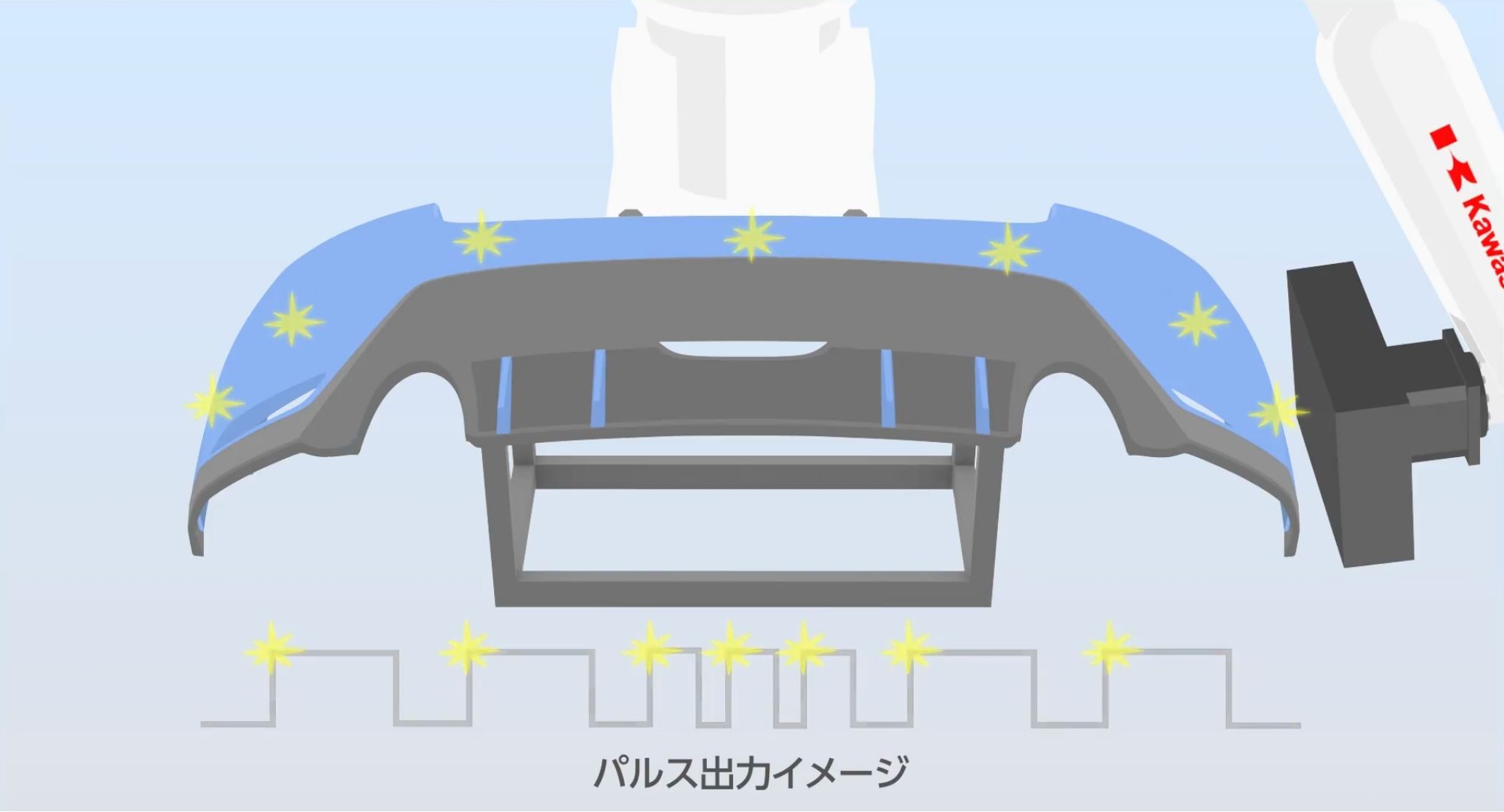
高速でパルスを出力することによって
曲面を持つ検査対象でも
カメラの性能を最適化します!
従来の検査システムとの比較


活用例を動画でご紹介


導入までの流れ
お問い合わせからご導入~運用開始まで、しっかりサポートいたします!
お問い合わせ
外観検査に課題や問題がある、もしくは川崎重工のロボット外観検査に興味を持たれた方はお問い合わせください。担当者からコンタクトいたします。
最適プランのご提案
お客様の課題や必要な情報(ワーク情報、検出したい不良、導入計画など)を伺った上で、ロボット導入の道筋や検証ステップをご提案いたします。
撮像トライ
お客様の見たい不良が検出できるか簡易的なトライを実施いたします。その際に平板のテストサンプルの準備をお願いすることになります。
ロボットビジョントライ
6軸ロボットと実際の検査対象を使った撮像のトライを実施いたします。実機を使ってサイクルタイムの検証を行います。
ロボット設備ご提案
カメラとロボットの両方を熟知したパートナーインテグレーター(Sier)がお客様に最適なロボットの周辺設備を提案いたします。
アフターフォロー
全国に拠点を持つロボットサービス部隊が迅速な対応や最適な予備品提案をいたします。
よくあるご質問
Q エリアカメラとラインカメラの違いは?
エリアカメラ:一般的なカメラのイメージで面状に対象物を撮像(アームが止まって撮像を行うため、タクトタイム遅い)
ラインセンサーカメラ:スキャナーのイメージで線状に対象物を撮像(アームを動かしながら走査できるため、タクトタイム早い)
Q どのようなラインカメラが接続できるのか?
パルス入力を受け付けるカメラであれば接続可能。
Q 高速パルス出力機能とは?
川崎重工業の特許技術。ロボットのツール先端移動量を一定距離間隔でパルス信号をリアルタイム出力する機能。
このパルス信号を撮像のトリガーにすることでロボットの動作速度に関係なく、均一な撮像が可能。
Q どのようのものを検査するのか?
材質:塗装部品、樹脂成型品、セラミック製品、FRPなどの複合材、鉄製品 など
内容:キズ、汚れ、へこみ、バリ、変形、塗装ブツ など
Q どのくらいの大きさのワークまで対応可能か?
ロボットの可動範囲に依存する(Fコン対応機のみ)。
走行装置などの外部軸にも対応可能。
Q 実機検証はすぐ行ってくれるのか?案件を進めるステップはどんな流れになるか?
実機検証にあたっては、ワーク情報、タクトタイム、スケジュールなどを確認のうえ見積提案をさせていただきます。
お問い合わせ
製品・サービスの詳細内容をお知りになりたい方は下記よりお問い合わせください。