Spécifications des robots
- Robots prisduAro1(D Controller, F Controller)/ duAro2(F Controller)


Pour la série duAro 1, 2 de Kawasaki Heavy Industries, Ltd.
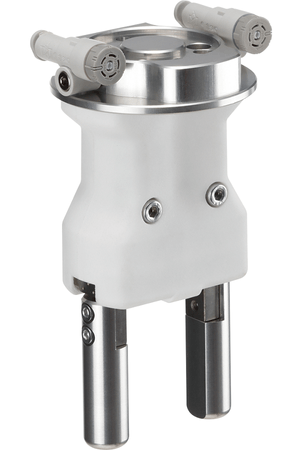
・Produit compact et léger avec une force de préhension élevée grâce au fonctionnement pneumatique
Une pince à air qui réalise une rigidité élevée et une haute précision grâce à sa construction à guidage intégré
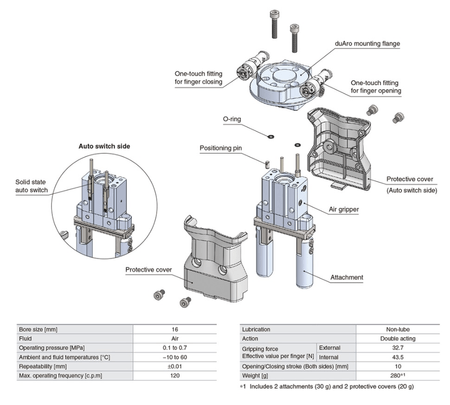
Avec guidage linéaire de haute précision, Répétabilité : ±0,01 mm
Un guide linéaire de la plus grande rigidité et précision est utilisé. Rigidité plus élevée
Mécanisme de réglage de la vitesse intégré
・Une housse de protection fendue pour un entretien facile de la pince à air
Fixation, capot de protection et nombre de détecteurs sélectionnables

Unité de préhension pneumatique K-AddOn SMC pour robots collaboratifs
Pour les manuels et les documents techniques liés au produit lui-même, veuillez vous référer au lien du produit ci-dessus.
Reportez-vous au 'duAro, manuel d'instructions' pour le câblage et la tuyauterie d'air.
Ce produit peut également être utilisé pour les robots Kawasaki avec des surfaces de montage de bride assorties. Veuillez vous renseigner auprès des demandes de renseignements suivantes.