Desde que a Kawasaki Heavy Industries fabricou o primeiro robô industrial no Japão em 1969, a Kawasaki tornou-se um fabricante líder de robôs com uma história rica em robôs. Desenvolvemos robôs para uma vasta gama de indústrias em todo o mundo, desde a automóvel à de semicondutores. Os seguintes marcos descrevem a nossa história de robots, que se estende por mais de 50 anos:
1968
Assinatura de um contrato de licença com a Unimation (EUA)
1969

Início da produção comercial do primeiro robot industrial, Unimate, no Japão
1981
Início da produção de um robô elétrico (série P)
1983
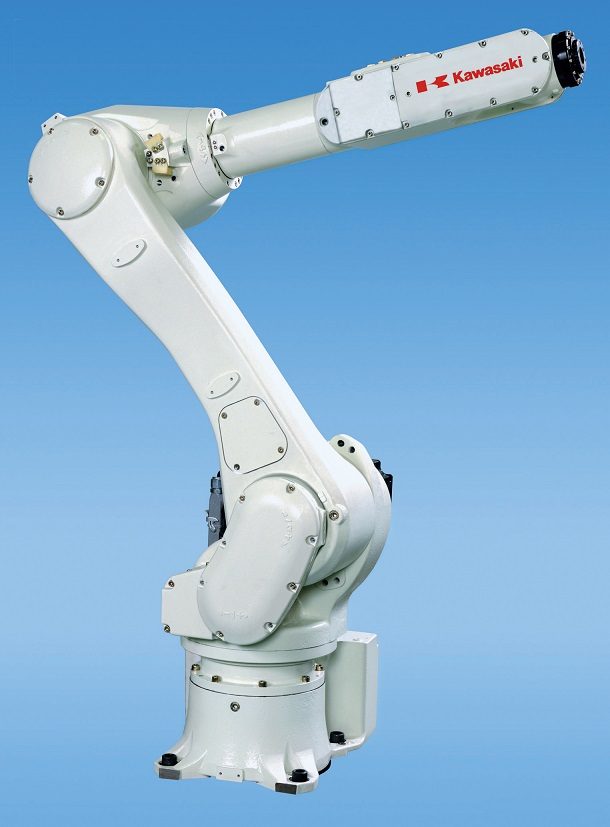
Lançamento de um grande robot de uso geral (série E)
1986
Terminou a parceria com a Unimation e iniciou o desenvolvimento interno e a expansão global
1989
Lançamento do robot de uso geral pequeno-médio (série J)
1990
Fundada uma subsidiária local, a Kawasaki Robotics (USA), Inc., em Detroit, EUA
1992

Lançamento de um grande robô de uso geral (série U)
Lançamento do controlador totalmente digital (série AD)
1995
Fundada uma subsidiária local, a Kawasaki Robotics GmbH, em Neuss, Alemanha.
A fábrica de Akashi (Divisão de Robôs) adquiriu a certificação ISO9001
1996
Fundada a subsidiária local Kawasaki Robotics (UK), Ltd. no Reino Unido
1997
Lançamento do controlador totalmente digital (série C)
Expansão do negócio de robôs limpos
1998

Lançamento do robot de uso geral pequeno-médio (série F)
A fábrica de Akashi (Divisão de Robots) adquiriu a certificação ISO14001
1999

Fundação de uma subsidiária local, a Kawasaki Machine Systems Korea, Ltd. em Incheon, Coreia
Lançamento de um grande robot de uso geral (série Z)
2000

Adquiriu o negócio de robôs de pintura da Kobe Steel, Ltd.
Lançou um robô de limpeza do tipo articulado horizontal (série NS)
2002

Lançado o robô de pintura (série K)

Lançado o robô de uso geral de carga útil extra-pesada (série M)
Lançamento do controlador de robô (série D)
2003

Lançamento de um robô de limpeza do tipo articulado horizontal (série NX)
2004
Desenvolvimento e lançamento da nova tecnologia FSJ (Friction Spot Joining)
2006
Fundada uma subsidiária local, a Kawasaki Robotics (Tianjin) Co., Ltd. em Tianjin, China
2007
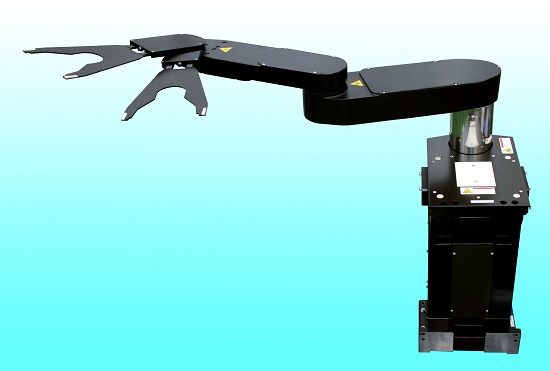
Lançamento do robô limpo de tipo articulado horizontal (série NT)
2008
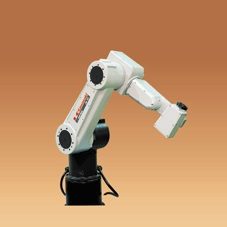
Lançamento do robô de uso geral, pequeno-médio (série R)
Lançamento do controlador de alto desempenho (série E)
2009

Lançamento do robô de recolha (série Y, picKstar)
2011

Lançado o robô de soldadura por pontos (série BX)
2013
Criação da Medicaroid Corporation para desenvolver robôs médicos
Lançamento de robôs para aplicações médicas e farmacêuticas (MC004N, MS005N)
2015

Lançamento do robô de carga útil extra-grande, MG10HL

Lançamento do robô SCARA de braço duplo “duAro”, que pode colaborar com humanos em operações de trabalho
2017

Lançamento de pequenos robôs de carga útil de alta velocidade, RS007N e RS007L

Lançamento de um novo sistema de robots “Successor” que reproduz os movimentos de trabalhadores qualificados através de coordenação remota
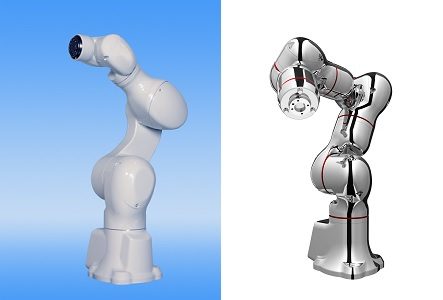
Primeira estreia do robô humanoide “Kaleido” na Exposição Internacional de Robôs
2018

Assinalámos o 50.º aniversário da nossa atividade no domínio da robótica

Lançamento do robô SCARA colaborativo de braço duplo, duAro 2
2019

Evolução do robô humanoide “Kaleido” para aplicações práticas na vida real
Acerca de

Acerca da Divisão de Robótica

Localizações

Kawasaki Heavy Industries ltd.

Registos ISO
