Depuis que Kawasaki Heavy Industries a fabriqué le premier robot industriel au Japon en 1969, nous sommes devenus le principal fabricant de robots et avons travaillé au développement de l’industrie automobile et d’autres industries au Japon et dans le monde. Ce qui suit décrit notre histoire en robotique industrielle, qui s’étend sur plus de 50 ans.
1968
Accord de licence signé avec Unimation (USA)
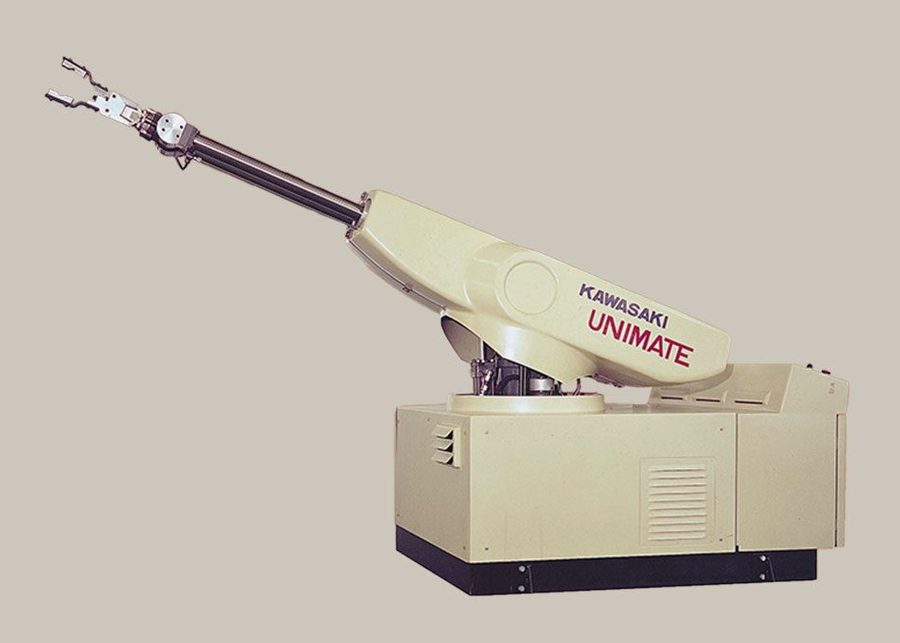
1969

Début de la production commerciale du premier robot industriel, Unimate, au Japon
1981
Début de la production d’un robot électrique (série P)
1983
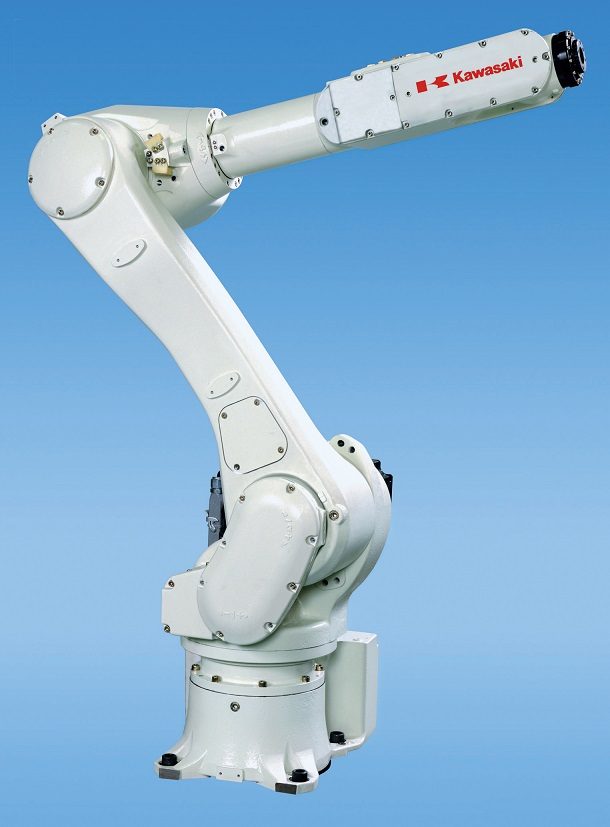
Lancement d’un grand robot polyvalent (série E)
1986
A mis fin au partenariat avec Unimation et a commencé le développement en interne et l’expansion mondiale
1989

Lancement d’un robot polyvalent petit-moyen (série J)
1990
Création d’une filiale locale Kawasaki Robotics (USA), Inc. à Detroit, USA
1992

Lancement d’un grand robot polyvalent (série U)
Lancement du contrôleur entièrement numérique (série AD)
1995
Création d’une filiale locale Kawasaki Robotics GmbH, à Neuss, en Allemagne.
L’usine d’Akashi (division Robot) a obtenu la certification ISO9001
1996
Création d’une filiale locale Kawasaki Robotics (UK), Ltd. au Royaume-Uni
1997
Lancement du contrôleur entièrement numérique (série C)
Développement de l’activité de robots propres
1998

Lancement d’un robot polyvalent petit-moyen (série F)
L’usine d’Akashi (division Robot) a obtenu la certification ISO14001
1999

Création d’une filiale locale, Kawasaki Machine Systems Korea, Ltd. à Incheon, Corée
Lancement d’un grand robot polyvalent (série Z)
2000

Acquisition de l’activité de robots de peinture de Kobe Steel, Ltd.
Lancement du robot propre de type articulé horizontal (série NS)
2002

Lancement du robot de peinture (série K)

Lancement d’un robot polyvalent à charge utile extra-lourde (série M)
Contrôleur de robot lancé (série D)
2003

Lancement du robot propre de type articulé horizontal (série NX)
2004
Développement et lancement de la nouvelle technologie FSJ (Friction Spot Joining)
2006
Création d’une filiale locale Kawasaki Robotics (Tianjin) Co., Ltd. à Tianjin, Chine
2007
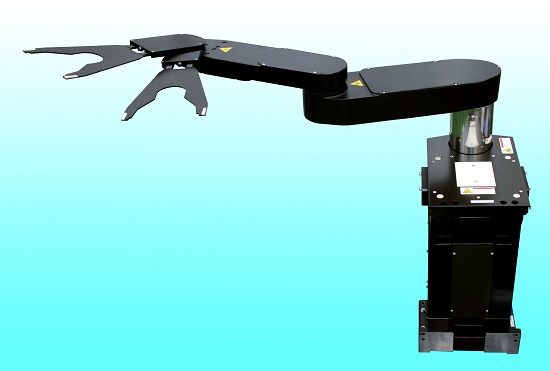
Lancement du robot propre de type articulé horizontal (série NT)
2008
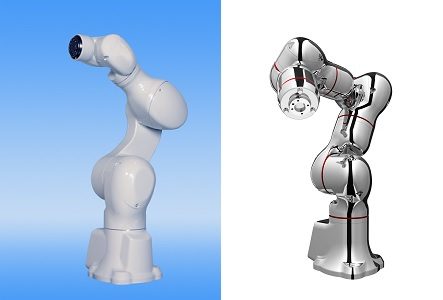
Lancement d’un petit-moyen robot polyvalent (série R)
Lancement du contrôleur haute performance (série E)
2009

Lancement du robot de prélèvement (série Y, picKstar)
2011

Lancement du robot de soudage par points (série BX)
2013
Création de Medicaroid Corporation pour développer des robots médicaux
Lancement de robots pour applications médicales et pharmaceutiques (MC004N, MS005N)
2015

Lancement du robot de charge utile extra-large, MG10HL

Lancement du robot SCARA à deux bras « duAro » qui peut collaborer avec les humains dans les opérations de travail
2017

Lancement de petits robots de charge utile à grande vitesse, RS007N et RS007L

Lancement d’un nouveau système de robot « Successor » qui reproduit les mouvements des travailleurs qualifiés grâce à la coordination à distance
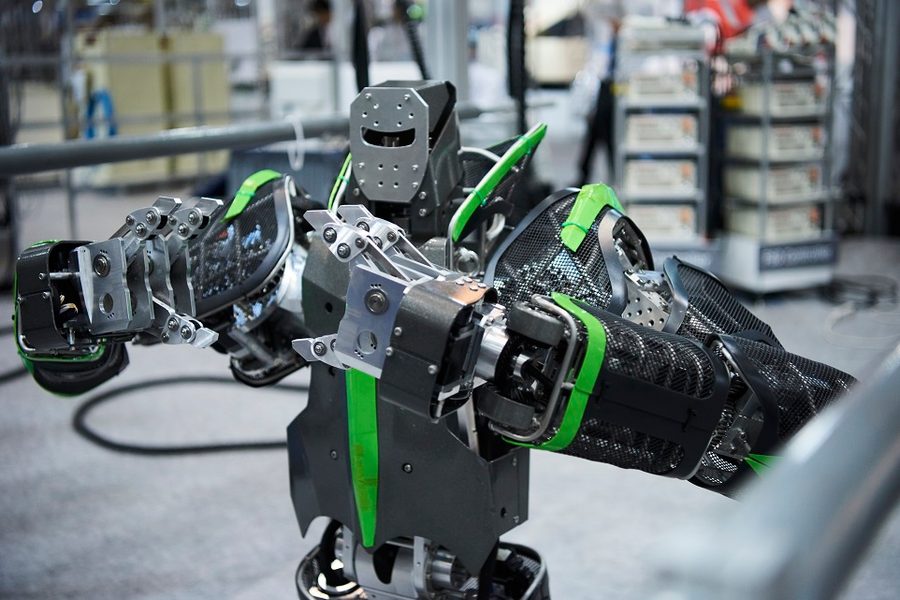
Premier lancement du robot humanoïde « Kaleido » à l’International Robot Exhibition
2018

A marqué le 50e anniversaire de notre entreprise de robotique

Lancement du robot SCARA collaboratif à deux bras, duAro 2
2019

Développement du robot humanoïde « Kaleido » pour des applications pratiques dans la vie réelle
À propos

À propos de la division robotique
Les robots Kawasaki sont utilisés dans divers secteurs, notamment les secteurs de l’automobile, de l’électricité et de l’électronique.

Emplacements
Nous avons un réseau de sites et de soutien dans l’UE et en Afrique.
Histoire
Ce qui suit décrit notre histoire en robotique industrielle, qui s’étend sur plus de 50 ans.

Kawasaki Heavy Industries Ltd.
Nous sommes une société d’ingénierie polyvalente avec plus de 100 ans d’histoire avec des technologies qui desservent de nombreux domaines d’activité couvrant la terre, la mer et l’air.

Certifications ISO
Découvrez nos certifications ISO.

Carrières
Renseignez-vous sur les informations sur l’emploi.