川崎機器人(Kawasaki Robotics)的工程師松田喜平(Kippei Matsuda)在 2022 年的 “NFL 健康與安全-頭盔分配 “競賽中取得了驕人的成績,該競賽由美國國家橄欖球聯盟(NFL)和亞馬遜公司在全球人工智能數據分析競賽平台 Kaggle 上主辦,競爭十分激烈。我們採訪了松田,了解他是如何在與全球雄心勃勃的人工智慧開發者的競爭中勝出的,以及川崎機器人公司目前是如何為各種解決方案開發技術的。
請描述 NFL 的挑戰、解決方案以及其令人興奮之處?
比賽的目的是識別球員的碰撞,全球有 1000 多名數據科學家參加比賽,利用 NFL 的比賽錄影和感測器資訊建立一個精確的解決方案。眾所周知,美式足球是世界上最艱苦、最耗費體力的運動之一,涉及高衝擊力的接觸,雖然球員們都穿著護具,但受傷的情況還是很普遍。特別是頭部碰撞,經常會導致嚴重受傷或殘疾,而如何減少碰撞的影響並在受傷後進行有效治療一直是個難題。
如果我們能準確識別哪些球員在比賽中頭部受到撞擊,我們就能有效地進行治療,並推進對頭盔的影響以及如何減輕撞擊的研究。手動進行此類研究非常耗時,因此美國橄欖球聯盟舉辦了這次比賽,希望利用人工智慧技術來解決這個問題。
贏得比賽的關鍵在於成功整合了視訊和感測器資訊這兩種不同的數據類型。我們利用視訊影像來識別球員的碰撞,並透過連接在球員身上的感測器來估計球員的位置。我們開發的人工智慧系統能夠細緻地分析和預測球員位置和姿勢的細微變化,例如蹲下或跌倒,這使我們脫穎而出。與其他參賽者相比,這項創新大大提高了我們的準確性。因此,我們的處理速度比人工操作快 83 倍,原來需要 3-4 天才能完成的任務現在只需 2 個小時就能完成,這讓我們非常滿意。
松田喜平
一般來說,人工智慧影像分析包括偵測影像中的物體,但在這次比賽中,我們必須考慮螢幕上球員在場上的三維(3D)位置,這是我們以前從未做過的令人興奮的挑戰。分析數據很困難,因為你必須一遍又一遍地看,但美國橄欖球聯盟的影片太震撼了,我喜歡一遍又一遍地看。正因為如此,在比賽結束時,我只需看看影片的標題,就能想像出球員的動作。
是什麼促使您參加 NFL 挑戰賽,結果如何?
這一切都源自於我認為這可以成為我學習的一部分。理論方面的知識可以從書本和其他管道學到,但知道如何使用實際數據並進行模擬卻很難。作為一名開發人員,接觸和分析數據並反覆試驗是必不可少的。我被競賽吸引,因為它提供的材料可以讓我進行實作學習。
“參加比賽讓我將人工智慧開發付諸實踐
松田喜平
老實說,我從不覺得比賽本身有多困難,難的是如何抽出時間來學習和照顧家庭,因為我是利用個人時間來完成這項工作的。當我和孩子們在公園玩耍時,我會突然想:『也許我可以用這種方式來完成這一部分。這讓我很難放鬆。
我在火車上全身發抖。從這個專案一開始,我就不認為我能獲勝,但當我獲勝時,我非常興奮。我對獲獎毫無怨言,並高興地與身邊的每個人分享這一消息。那天我幾乎無法完成任何工作!
如今,您在川崎機器人公司是如何使用人工智慧視覺的?
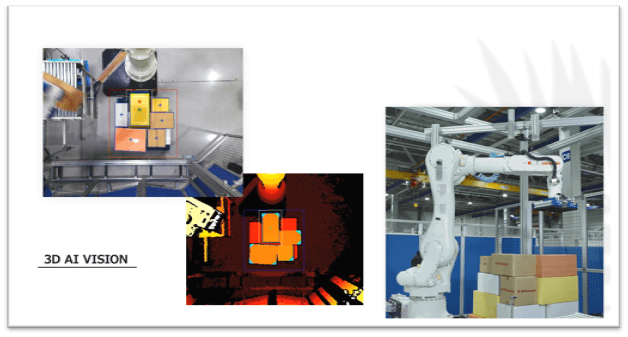
我目前正在參與開發專門用於機器人的人工智慧視覺產品。人工智慧可以分析攝影機捕捉到的影像,並以各種方式進行處理;例如,在我們的卸垛解決方案中,它可以處理需要卸載的產品影像。卸垛解決方案用於提高配送中心和工廠的卸貨效率。卸垛解決方案配備三維人工智慧視覺,能夠對其處理的貨物進行高度複雜的分析。
川崎機器人卸垛解決方案配備三維人工智慧視覺系統,能夠對所處理的貨物進行高度精密的分析。透過專業化卸載,我們實現了高性能、低成本。
松田喜平
人工卸載成本高、耗時長,而傳統的機器人解決方案不夠靈活,無法勝任這項工作。在這方面,與傳統解決方案相比,我們的卸垛解決方案成功提高了自動卸垛操作的準確性和速度。
例如,在傳統的機器人系統解決方案中,所有包裝的尺寸和形狀都必須在拾取前進行登記。如果未登記形狀的包裝進入工作流程,則無法進行處理。而我們的卸垛解決方案只需要登記最小和最大的尺寸,就可以處理所有包裝。
在傳統的機器人系統中,機器人需要知道所處理產品的正確尺寸和形狀。為了識別和確認產品的尺寸和形狀,需要一個攝影機。如果確認無誤,機械手臂就會拾取產品,而這是一個耗時的示教過程。
我們的拆垛解決方案除了最小和最大尺寸外,無需事先進行產品登記,從而大大減少了示教時間。
松田喜平
川崎機器人公司的拆垛解決方案成功的主要原因是,我們將低成本的攝影機硬體與強大的人工智慧軟體相結合,無需大量附加功能即可處理複雜的產品影像。我們透過專注於開發拆垛系統,實現了高效能且易於使用的解決方案,並透過縮小功能範圍,實現了比其他公司產品更高的性價比,使公司更容易引進該產品。
拆垛和人工智慧解決方案將如何繼續發展?
我認為,隨著收集的數據越來越多和人工智慧學習的進步,拆垛解決方案的效率也會提高。例如,開發拆垛解決方案的困難之一是包裝表面的線和膠帶。當人工智慧看到它們時,可能會誤以為這些線是紙板的邊界。這樣,它就會認為包裝盒比實際上小,從而誤取包裝盒。不過,如果將來在不同地點使用該系統並收集數據,它就能學習多種包裝的變化。這樣,即使箱子上有繩子、膠帶或貼紙,機器人也能根據以往的經驗正確卸載,而不會被誤導。為機器人收集大量高品質的數據是必要的。
我還認為,被稱為基礎設施模型的人工智慧將是關鍵。近年來備受關注的 ChatGPT 就是一個例子。由於基礎模型是在大量資料的基礎上訓練出來的,因此它具有非常高的識別能力,這是一種常識。基礎模型可以處理包括文字、圖像和聲音在內的各種訊息,有可能大大擴展機器人的應用範圍,而不僅限於物流領域。今後,我希望充分利用數據和基本模型,擴大人工智慧的應用範圍。