然而,川崎重工早在 2015 年就開始了人型機器人的研發工作,遠遠早於當前的關注熱潮。從那時開始,也將近十年過去,期間川崎重工不斷改良、穩定前進。因此Kaleido 9 已經成為這個進化中的第九代機器人。
人型機器人並非萬能。正因如此我們可以得出他的工作定位
川崎重工並不將人型機器人定位為「什麼都能做到的機器人」。
在作業流程固定、以及需要嚴格控管節奏的生產線上,使用專用機或工業用機器人會更加合理。
即便如此,仍有一些情況「刻意採用人型機器人」是具有意義的。
舉例來說
- 為人類設計的設備、工具、甚至樓梯都可以照常使用
- 不需要特別重新為機器人準備作業環境
- 人型機器人可以在難以事先預測任務的情況下靈活運用,例如災難現場應變。
我們認為人型機器人的最大價值在於「讓機器人適應人類世界」的概念,而非人類強迫讓環境適應機器人。
Kaleido 9 的主要進化點
01.大幅提升抗摔能力的結構設計
與上一代產品 Kaleido 8 相比,Kaleido 9 在結構上有了明顯的改進。
考慮到正式上市,我們重新設計了腿部結構,嚴格遵守零組件額定值。
藉由維持相同扭力的情況下提升動作速度,使其在失去平衡時腿部能更迅速地跨出步伐,從而大幅提高了川崎重工人型機器人所具備的最大特色──高穩定性。
02.能識別、能判斷、能行走的自主步行
Kaleido9 能夠自主行走,同時持續識別和理解周圍環境。
在示範中,Kaleido 9 即時做出類似人類的判斷 – 偵測並避開人群和障礙物、辨識樓梯上的台階、自動調整步伐以避免踩到邊緣和角落。Kaleido 9 的自主行走能力是在 LiDAR (Light Detection and Ranging) 的基礎上,利用 SLAM (Simultaneous Localization and Mapping) 進行自我定位。
03.專為現實生活所設計的直覺式遠端遙控方案
配備 AI 的完全自主人型機器人仍然面臨許多技術挑戰。川崎重工並沒有一下子就追求完全自主,而是構想了一套實際可行、循序漸進的方法。
這些方法包括
- 遠端操作,允許人類在需要時直接介入
- 混合操作,人類處理高複雜度的任務,而例行或較單純任務則交由AI輔助
Kaleido 9 支援透過頭戴式顯示器進行直覺式即時遠端操作,並已在災難應變情境中展現作用,突顯其作為真實世界救災方案的潛力。
不只是走路。Kaleido Station 背後的理念
Kaleido 9 的另一個特色是 Kaleido Station。
這個移動平台的設計目的是利用輪子在平地上實現高效率的長途旅行,而 Kaleido 本身則在抵達工作現場後站立並執行任務。
展望未來,Kaleido Station 也計劃作為充電站使用。透過結合人型與輪式移動的優點,川崎重工正在追求一種實際在社會實踐的方法。
人型機器人的技術路線圖:逐步演進
人型機器人不會突然變得能夠自主完成所有事情。
Kawasaki 認為,在社會中實際使用人型機器人將分階段進行。
2030 年左右:工廠和其他環境中的獨立操作和支援
2030 年左右,人型機器人預計將主要用於可控環境,如一般工廠和其他工業設施。在這些環境中,它們將在遠端操作下執行獨立工作,並支援人們的日常作業。
在此階段,所需的關鍵技術將是如何連接人類與機器人。這些技術包括遠端操作、會話式互動、語音指示、自主移動的 SLAM 以及感測環境。人型機器人的主要優勢之一,就是能夠使用原本為人類設計的設備和工具。在這種模式下,人類仍負責判斷,而機器人則利用其體能來執行任務。
主要的應用情境包括
- 醫療和護理環境中的溝通支援
- 運輸和巡邏等簡單任務
所需的關鍵技術和能力:
- 環境意識
- 遠端操作
- 對話互動與回應語音指示
- 基於 SLAM 的自主移動性
2040 年左右:在非特定環境中自主操作,應用範圍更廣泛
展望 2040 年左右,人型機器人預計將能夠在非特定環境中自主操作,同時持續識別和瞭解周遭環境。預計它們的應用範圍將擴大到更複雜、變動更大的工作場所,包括在高空、密閉空間和災害應變場所執行的任務。
這個階段將需要廣泛的先進技術,例如增強的環境感測、姿勢控制、接觸感測、靈巧的手部控制、物體識別以及群體控制。除了自主移動性和環境感知等核心能力之外,直接促成任務執行的先進控制技術也將在支援這些運用上扮演關鍵角色。
主要的應用情境包括
- 在具挑戰性的環境中進行移動,例如在高空和密閉空間工作
- 高性能任務,包括組裝和維護
所需的關鍵技術和能力:
- 回應語音指示
- 接觸感應器
- 環境感測
- 姿勢控制
- 手部控制
- 群體控制
- 物體辨識
2050 年左右:面向所有環境和任務的人型機器人
到 2050 年左右,我們的目標是讓人型機器人發展成為能夠靈活應對所有環境和任務的系統,無論是室內還是室外。在這個階段,除了能夠在不同環境下運作的技術之外,高度的環境耐受性也是不可或缺的。這包括防水和防塵,以及耐熱、耐寒、耐輻射和耐腐蝕性氣體。
人型機器人的基本價值在於能夠在與人類相同的環境中移動和操作,代表人類執行任務,即使是在工作性質無法事先清楚界定的情況下。
主要的應用情境包括
- 在所有環境中運作,包括戶外和災難應變環境
所需的關鍵技術和性能:
- 耐各種環境,例如防水、防塵、耐熱、耐寒、耐輻射、耐腐蝕氣體等
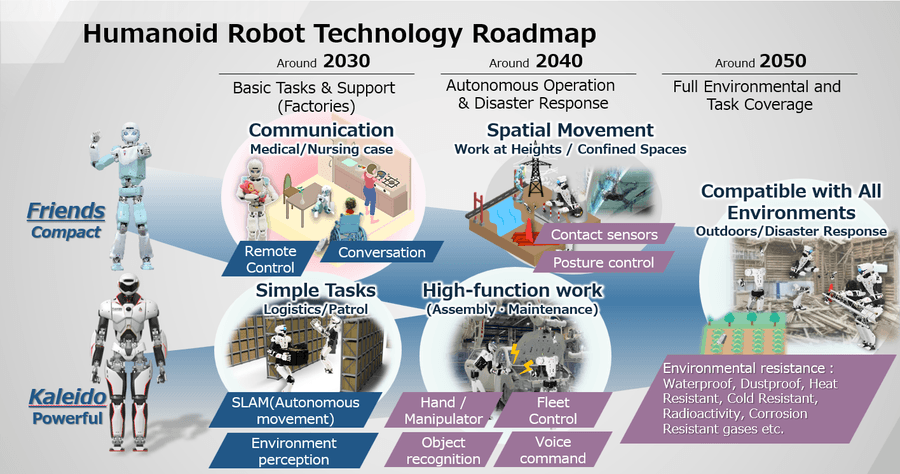
終極目標:災難應變場所
Kawasaki 人類開發的最終目的地是災難現場。日本很容易發生自然災害,需要對無法事先預見的情況做出反應。Kaleido 9 是邁向未來堅實的一步。