
▼精確的移動軌跡和觸地時間 ▼
川崎公司多年來開發的虛擬機器人控制器技術,可以高精度地再現移動軌跡和觸地時間。
▼ 支援多個機器人和外部軸 ▼
您可以同時模擬具有不同控制器的多個機器人。
您也可以自由重現由機器人控制器控制的外部軸。 ▼
▼ 干擾檢查、佈局驗證 ▼
在實際裝置上安裝之前,您可以事先檢查電腦上是否有任何干擾或操作範圍問題。
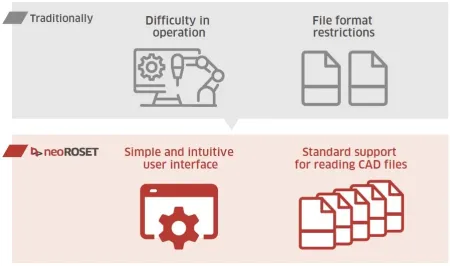
▼CAD 檔案匯入 ▼
標準支援匯入多種類型的 CAD 檔案,對於佈局建構和 CAD 教學非常有用。
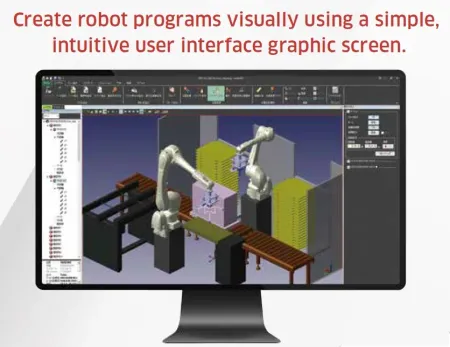
▼ AS 語言編輯器 ▼
此編輯器可讓您結合圖形螢幕輕鬆製作川崎機器人語言程式。
▼ 3D PDF 製作 ▼
可將模擬過程中的動作輸出至檔案,並使用標準 PDF 閱讀器進行 3D 播放,對於簡報和資訊分享非常有用。
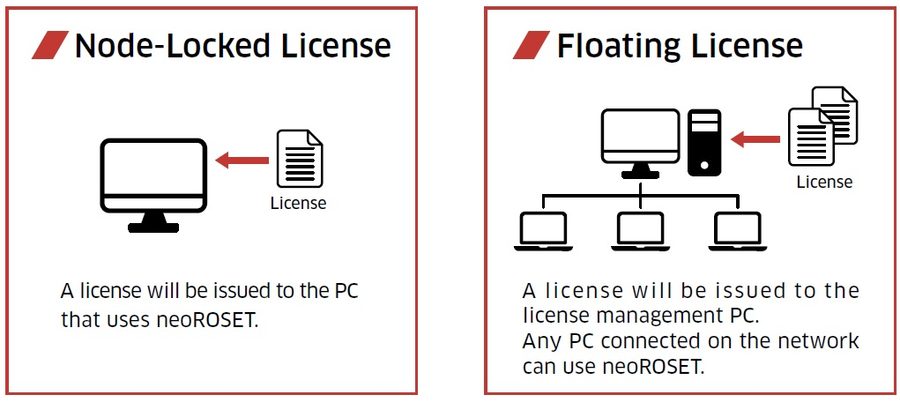
訂閱
軟體許可證有兩種:節點鎖定和浮動許可證。
系統需求
| 項目 | 內容 |
|---|---|
| 作業系統 (OS) | Windows🄬11Pro×64/WIndows(R)11 Enterprisex64 日文版 / 英文版 / 中文版 / 德文版 |
| CPU | 建議使用 Intel Core i5 或更高規格 |
| 記憶體 | 最低 8GB 記憶體,建議 16GB 以上 |
| 可用空間 | 30GB 或以上,建議使用固態硬碟 (SSD) |
| 解析度 | 建議 1920 x 1080 或更高 |
| 顯示卡 | Intel UHD Graphics 或更高 建議使用 NVIDIA Quadro 系列 |
| 其他需求 | 滑鼠(建議使用包含滾輪的樣式)或同等的指標裝置。 需要PDF Reader,例如 Adobe® Acrobat® Reader |