Já se interrogou sobre o funcionamento de um braço de robot?
Quando se trata de instalar robôs, mesmo um ligeiro conhecimento da estrutura e do movimento dos braços de robôs industriais pode contribuir muito para uma implementação bem sucedida. Ao saber o que se passa no interior do robô, pode compreender melhor aquilo de que o robô é capaz.
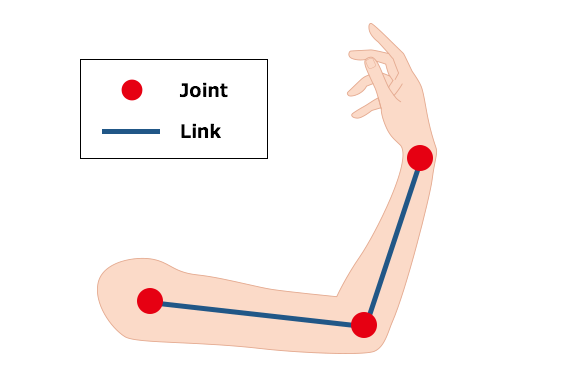
Ligações e articulações
Os robôs e os seres humanos são mais parecidos do que se possa pensar. Os seres humanos e os robôs mecânicos – por muito opostos que possam parecer, partilham a mesma estrutura subjacente de ligações (ossos) e articulações. As partes que podem dobrar-se e mover-se livremente, como o cotovelo e o ombro, são as articulações, e os ossos que ligam essas articulações são equivalentes às ligações de um robô. O princípio do movimento das articulações e da transmissão de energia através das ligações é comum aos seres humanos e aos robots.
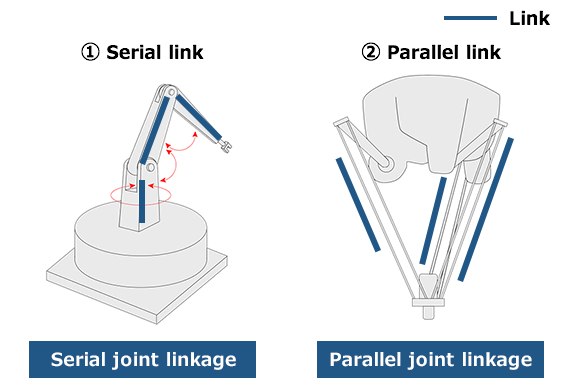
Os robôs são classificados em dois tipos, de acordo com a forma como os seus elos estão dispostos:
- Ligação em série
- Ligação paralela
O braço humano é classificado como uma ligação em série, uma vez que as suas articulações – o ombro, o braço e o pulso – estão alinhadas em série. Os robôs delta são classificados como uma ligação paralela, uma vez que as suas articulações estão alinhadas umas ao lado das outras. Os robôs industriais também são classificados em várias categorias, tais como articulados verticalmente e articulados horizontalmente (SCARA), dependendo da forma como as articulações se movem e da sua estrutura.
Fazer o robô
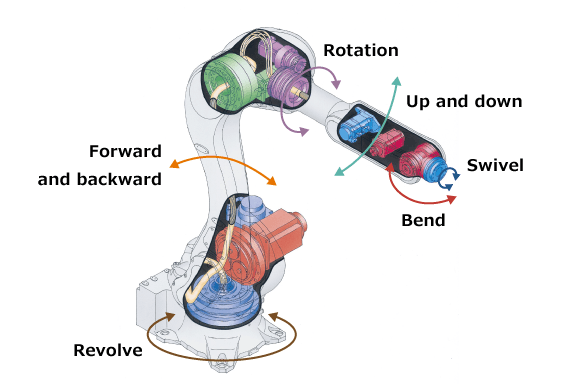
Vejamos agora o movimento de um robô articulado verticalmente, que tem uma estrutura mecânica semelhante à de um braço humano. Um robô articulado verticalmente é um robô industrial com uma estrutura de ligação em série. É geralmente composto por seis articulações (6 eixos).
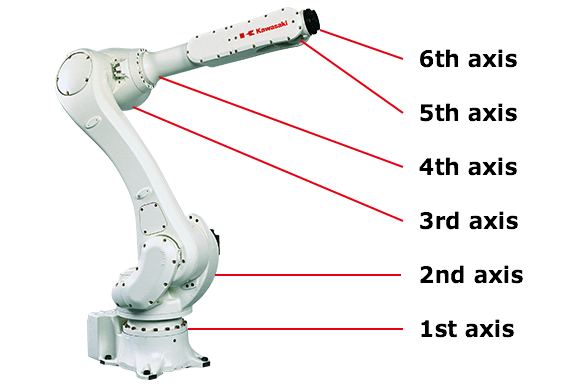
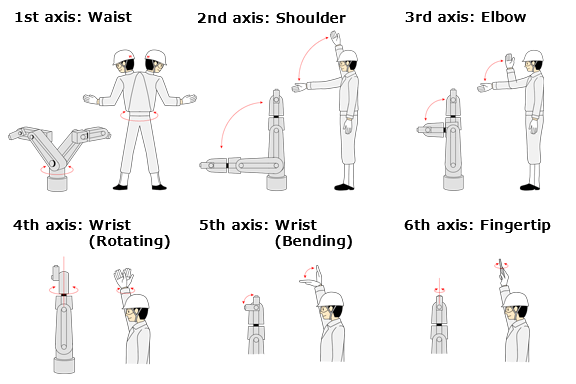
O primeiro ao terceiro eixo corresponde à cintura até ao braço e o quarto ao sexto eixo corresponde ao pulso até à ponta dos dedos. Os primeiros três eixos levam o pulso para uma posição específica e os três eixos seguintes movem o pulso livremente. Esta construção de 6 eixos permite que os robots se movam livremente como os humanos.
O que há no interior
Em seguida, vamos examinar em pormenor a estrutura interna dos robôs industriais.
A ilustração abaixo mostra a estrutura interior do robô de uso geral de carga útil pequena e média da Kawasaki, a série R. Os robôs da série R estão activos em todo o mundo numa vasta gama de aplicações, desde a montagem à soldadura por arco. Uma vez que os cabos e as cablagens podem ser incorporados no interior do braço, é possível evitar interferências com equipamento periférico e o robô pode trabalhar num espaço reduzido. A sua caraterística definidora é a rapidez de funcionamento que pode corresponder a movimentos ágeis.
Nesta ilustração, pode ver-se que um robô é composto por muitas partes diferentes. Entre essas peças encontram-se quatro particularmente importantes: o atuador, a engrenagem de redução, o codificador e a transmissão.
Actuadores
O atuador é um componente que funciona como a articulação do robô. Esta peça permite que um robô mova o seu braço para cima e para baixo ou rode, e converte energia em movimentos mecânicos. Pode ser difícil compreender este conceito, mas pense nos motores como um exemplo de actuadores. Os pontos marcados por círculos vermelhos na ilustração abaixo são a posição dos motores da série R:
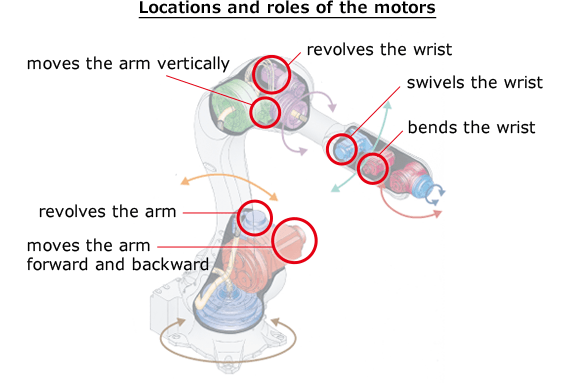
No entanto, os motores simples, como os utilizados nos kits de modelos de plástico, podem não ser capazes de executar movimentos de alta precisão. É por isso que utilizamos servomotores altamente funcionais, que podem controlar a posição e a velocidade. A fonte de energia mais comum para alimentar os actuadores é a eletricidade, mas também pode ser utilizada energia hidráulica e pneumática. Alguns actuadores hidráulicos exclusivos podem gerar grandes quantidades de energia, mantendo a resistência ao choque.
Engrenagens de redução
Uma engrenagem de redução é um dispositivo que aumenta a potência do motor. Um motor por si só é limitado na quantidade de potência que pode produzir. Para gerar mais potência, os motores são utilizados em combinação com uma engrenagem de redução. As áreas circuladas a azul na ilustração seguinte são as engrenagens de redução:
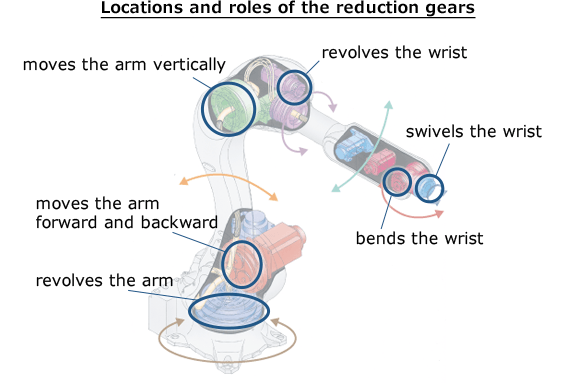
Por exemplo, as bicicletas têm engrenagens de tamanhos diferentes nas rodas dianteira e traseira. Por exemplo, as bicicletas têm engrenagens de tamanhos diferentes na roda dianteira e na roda traseira. Geralmente, a transmissão (verá mais adiante) é utilizada para mudar as engrenagens da roda traseira. Quando se seleciona uma mudança grande e se minimiza o número de rotações da roda, a pedalada torna-se mais fácil à custa da velocidade. A subida de colinas íngremes torna-se muito mais fácil e a potência de saída pode ser aumentada. Este é o mesmo conceito das engrenagens de redução nos braços dos robots industriais.
Codificadores
Um codificador é um dispositivo que indica a posição (ângulo) do eixo de rotação de um motor. Ter um codificador pode fornecer dados tangíveis sobre a quantidade e a direção em que o robô se move. Os codificadores ópticos gerais obtêm a sua informação a partir de um disco ligado ao eixo rotativo do motor. O disco tem fendas a intervalos regulares para permitir a passagem da luz. Existem díodos emissores de luz (LEDs) e elementos receptores de luz (fotodíodos) em ambos os lados do disco para distinguir as intensidades de luz (claro e escuro).
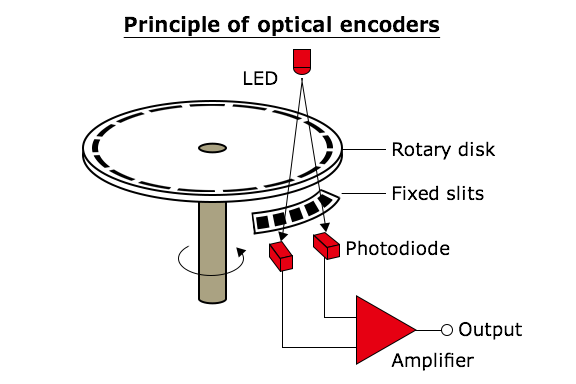
Quando o motor roda, a luz é bloqueada ou passa através das fendas, pelo que o ângulo de rotação e a velocidade podem ser determinados através da leitura dos sinais. Isto permite que os servo-motores controlem com precisão o posicionamento e a velocidade.
Transmissão
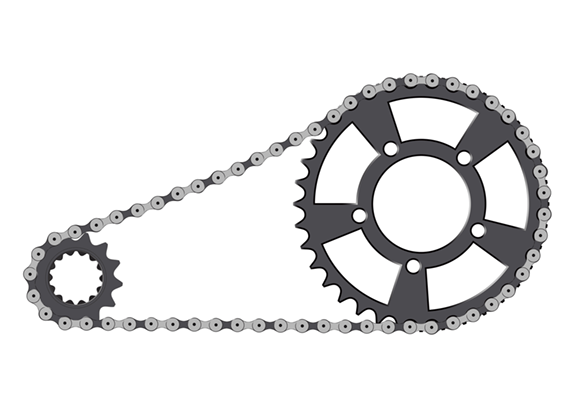
A transmissão é um componente que transmite a potência gerada pelos actuadores e pelas engrenagens de redução. A transmissão também é capaz de alterar a direção e a magnitude da potência. Voltando à bicicleta como exemplo, a corrente que liga a manivela à roda traseira é a transmissão. As bicicletas são acionadas retirando o movimento de rotação dos pedais e transferindo-o para a roda traseira através da transmissão.
Esta ideia também se aplica à estrutura do robot. Um motor utilizado em robôs é normalmente colocado perto das articulações, mas também pode ser colocado longe das articulações, utilizando mecanismos de transmissão como correias e engrenagens. Veja-se, por exemplo, a série R. Estes robots têm pulsos compactos porque um motor pode ser instalado na parte do cotovelo do braço através do mecanismo de condução.
Possibilidades infinitas com os efeitos finais
Diferentes ferramentas permitem ao ser humano efetuar várias tarefas. No caso dos robôs industriais, a troca do dispositivo ligado ao pulso torna um robô altamente versátil, permitindo-lhe realizar uma variedade de trabalhos. Este dispositivo é designado por “end effector”, ou ferramenta de extremidade do braço (EOAT), e existe uma grande variedade no mercado, incluindo pinças que levantam objectos, tipos de vácuo (sucção) e ferramentas para processos especializados como a soldadura e a pintura. Os robôs podem executar praticamente qualquer tarefa, combinando o movimento flexível do próprio braço e os dispositivos finais específicos da tarefa.
