Der Ingenieur Kippei Matsuda von Kawasaki Robotics hat eine bemerkenswerte Leistung vollbracht, indem er den Wettbewerb „NFL Health & Safety – Helmet Assignment“ im Jahr 2022 gewonnen hat. Dabei handelt es sich um eine hart umkämpfte Veranstaltung, die von der National Football League (NFL) und Amazon.com, Inc. auf Kaggle, einer globalen KI-Datenanalyseplattform, ausgerichtet wurde. Wir sprachen mit Matsuda darüber, wie er den Wettbewerb gegen ehrgeizige KI-Entwickler auf der ganzen Welt gewann und wie Kawasaki Robotics derzeit die Technologie für verschiedene Lösungen entwickelt.
Beschreiben Sie die Herausforderung der NFL, die Lösung und was machte sie so spannend?
Ziel des Wettbewerbs war es, Kollisionen von Spielern zu erkennen. Mehr als 1.000 Datenwissenschaftler weltweit traten an, um eine genaue Lösung auf der Grundlage von NFL-Spielmaterial und Sensordaten zu entwickeln. American Football ist bekanntlich eine der härtesten und körperlich anstrengendsten Sportarten der Welt, bei der es zu heftigen Kontakten kommt, und obwohl die Spieler Schutzkleidung tragen, sind Verletzungen keine Seltenheit. Insbesondere Kollisionen mit dem Kopf führen oft zu schweren Verletzungen oder Behinderungen, und es ist eine Herausforderung, Wege zu finden, um die Auswirkungen von Kollisionen zu verringern und eine wirksame Behandlung nach einer Verletzung zu ermöglichen.
Wenn wir genau feststellen könnten, welche Spieler während eines Spiels Kopfverletzungen erlitten haben, könnten wir eine wirksame Behandlung durchführen und die Erforschung der Auswirkungen von Helmen und der Möglichkeiten zur Minderung der Folgen vorantreiben. Diese Art von Forschung manuell durchzuführen, wäre extrem zeitaufwändig, weshalb die NFL diesen Wettbewerb ausgeschrieben hat, um dieses Problem mit Hilfe von KI-Technologie zu lösen.
Der Schlüssel zum Erfolg lag in der erfolgreichen Integration von zwei unterschiedlichen Datentypen, nämlich Video- und Sensorinformationen. Wir nutzten Videobilder, um Zusammenstöße zwischen Spielern zu erkennen, und schätzten die Position der Spieler mithilfe von Sensoren, die an den Spielern angebracht waren. Die Entwicklung eines KI-Systems, das selbst kleinste Veränderungen der Spielerposition und -haltung, wie z. B. das Hocken oder Fallen, sorgfältig analysiert und vorhersagt, hat uns von anderen abgehoben. Diese Innovation verbesserte unsere Genauigkeit im Vergleich zu anderen Teilnehmern erheblich. Infolgedessen war unsere Verarbeitungsgeschwindigkeit 83-mal höher als bei der manuellen Bearbeitung, und Aufgaben, die bisher 3 bis 4 Tage in Anspruch nahmen, konnten nun in nur 2 Stunden erledigt werden, was wir sehr zu schätzen wussten.
Kippei Matsuda
Im Allgemeinen geht es bei der KI-Bildanalyse um die Erkennung von Objekten in Bildern, aber in diesem Wettbewerb mussten wir die dreidimensionalen (3D) Positionen der Spieler auf dem Spielfeld auf dem Bildschirm berücksichtigen, was eine spannende Herausforderung war, die wir noch nie zuvor gemacht hatten. Es ist schwierig, Daten zu analysieren, weil man sie sich immer wieder ansehen muss, aber das NFL-Video war so beeindruckend, dass ich es mir immer wieder gerne angesehen habe. So konnte ich mir am Ende des Wettbewerbs die Bewegungen der Spieler vorstellen, indem ich mir einfach die Titel der Videos ansah.
Was hat Sie dazu bewogen, an der NFL-Challenge teilzunehmen und welche Ergebnisse haben Sie erzielt?
Es fing damit an, dass ich dachte, es könnte ein Teil meines Studiums sein. Theoretische Aspekte kann man aus Büchern und anderen Quellen lernen, aber zu wissen, wie man tatsächliche Daten verwendet und eine Simulation durchführt, ist schwierig. Als Entwickler ist das Anfassen und Analysieren von Daten und die Wiederholung von Versuch und Irrtum unerlässlich. Der Wettbewerb hat mich gereizt, weil er Materialien bereitstellte, die zum praktischen Lernen führten.
„Die Teilnahme am Wettbewerb ermöglichte es mir, die KI-Entwicklung in die Praxis umzusetzen.
Kippei Matsuda
Ehrlich gesagt, habe ich den Wettbewerb selbst nie als schwierig empfunden; was schwierig war, war, Zeit für mein Studium und meine Familie zu finden, da ich in meiner Freizeit daran gearbeitet habe. Wenn ich mit meinen Kindern im Park spielte, dachte ich plötzlich: „Vielleicht könnte ich diesen Teil so machen“, und das hat mich gestört. Es war schwer, sich zu entspannen.
Ich saß im Zug und zitterte. Seit Beginn des Projekts habe ich nicht geglaubt, dass ich gewinnen könnte, aber als ich es dann tat, war ich begeistert. Ich kann mich nicht beschweren, dass ich gewonnen habe, und war glücklich, die Nachricht mit allen in meinem Umfeld zu teilen. Ich konnte an diesem Tag kaum etwas arbeiten!
Wie arbeiten Sie heute mit KI-Vision bei Kawasaki Robotics?
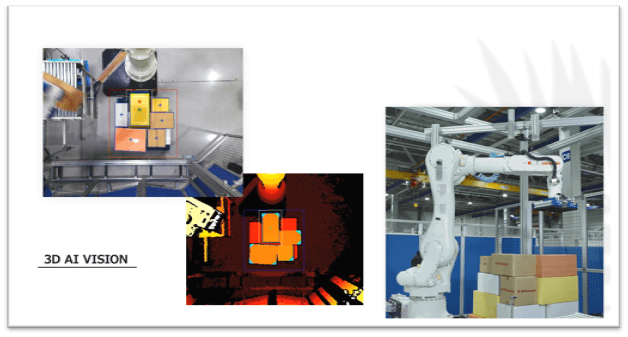
Ich bin derzeit an der Entwicklung von Produkten beteiligt, die KI-Vision speziell für die Robotik nutzen. KI analysiert Bilder, die von Kameras aufgenommen wurden, und verarbeitet sie auf verschiedene Weise; in unserer Entpalettierungslösung werden beispielsweise Bilder des Produkts verarbeitet, das entladen werden muss. Depalettierlösungen werden eingesetzt, um die Entladeeffizienz in Vertriebszentren und Fabriken zu verbessern. Die Depalettierlösung ist mit 3D-KI-Vision ausgestattet und in der Lage, hochentwickelte Analysen der von ihr gehandhabten Fracht durchzuführen.
Die Depalettierlösung von Kawasaki Robotics ist mit 3D-KI-Vision ausgestattet und in der Lage, hochentwickelte Analysen der gehandhabten Ladung durchzuführen. Durch die Spezialisierung auf das Entladen haben wir eine hohe Leistung zu niedrigen Kosten erreicht.
Kippei Matsuda
Das manuelle Entladen ist sehr kostspielig und zeitaufwändig, und herkömmliche Roboterlösungen sind nicht flexibel genug, um diese Arbeit zu bewältigen. In dieser Hinsicht ist es unserer Entpalettierlösung gelungen, die Genauigkeit und Geschwindigkeit der automatisierten Entladevorgänge im Vergleich zu herkömmlichen Lösungen zu erhöhen.
Bei herkömmlichen Robotersystemen müssen beispielsweise alle Packstückgrößen und -formen registriert werden, bevor sie entnommen werden. Wenn Pakete mit nicht registrierten Formen in den Arbeitsablauf gelangen, können sie nicht verarbeitet werden. Bei unserer Entpalettierungslösung hingegen müssen nur die kleinsten und größten Größen registriert werden, und alle Pakete können verarbeitet werden.
Bei herkömmlichen Robotersystemen muss der Roboter die richtige Größe und Form des zu verarbeitenden Produkts kennen. Eine Kamera ist erforderlich, um die Größe und Form des Produkts zu erkennen und zu bestätigen. Wenn dies bestätigt ist, nimmt der Roboterarm das Produkt auf, und das Anlernen des Systems ist ein zeitaufwändiger Prozess.
Unsere Depalettierlösung erfordert keine vorherige Produktregistrierung außer den Mindest- und Höchstmaßen, was die Einlernzeit erheblich reduziert.
KippeiMatsuda
Der Hauptgrund für den Erfolg der Depalettierungslösung von Kawasaki Robotics liegt darin, dass wir kostengünstige Kamerahardware mit unserer robusten KI-Software kombinieren, um komplexe Produktbilder ohne eine Reihe von Zusatzfunktionen zu verarbeiten. Durch die Konzentration auf die Entwicklung eines Entpalettierungssystems haben wir eine leistungsstarke und einfach zu bedienende Lösung entwickelt. Durch die Einschränkung der Funktionen haben wir ein besseres Kosten-Nutzen-Verhältnis als die Produkte anderer Unternehmen erzielt, was die Einführung des Produkts für Unternehmen erleichtert.
Wie werden sich Depalettierungs- und KI-Lösungen weiter entwickeln?
Ich glaube, dass die Effizienz von Depalettierungslösungen in dem Maße zunehmen wird, wie mehr und mehr Daten gesammelt werden und die KI-Lernfähigkeit zunimmt. Eine der Schwierigkeiten bei der Entwicklung einer Depalettierlösung waren beispielsweise die Fäden und Bänder auf der Oberfläche der Verpackungen. Wenn die KI diese sieht, kann sie die Fäden mit den Grenzen des Kartons verwechseln. Sie könnte dann zu dem Schluss kommen, dass der Karton kleiner ist als er tatsächlich ist, und ihn versehentlich mitnehmen. Wenn das System jedoch in Zukunft an verschiedenen Standorten eingesetzt wird und Daten gesammelt werden, kann es mehrere Varianten von Verpackungen lernen. Selbst wenn ein Karton mit Schnüren, Klebeband oder Aufklebern versehen ist, kann der Roboter ihn aufgrund seiner Erfahrungen aus der Vergangenheit richtig entladen, ohne in die Irre geführt zu werden. Dazu muss der Roboter eine Menge qualitativ hochwertiger Daten sammeln.
Ich glaube auch, dass die KI, das so genannte Infrastrukturmodell, eine Schlüsselrolle spielen wird. Ein Beispiel ist ChatGPT, das in den letzten Jahren viel Aufmerksamkeit erregt hat. Da das zugrunde liegende Modell auf der Grundlage einer großen Datenmenge trainiert wird, verfügt es über eine sehr hohe Erkennungsleistung, eine Art gesunden Menschenverstand. Grundlegende Modelle können eine Vielzahl von Informationen verarbeiten, darunter Text, Bilder und Ton, und haben das Potenzial, den Einsatz von Robotern nicht nur in der Logistik drastisch zu erweitern. In Zukunft möchte ich den Einsatz von KI ausweiten, indem ich die Daten und das Basismodell sinnvoll einsetze.
Klicken Sie hier für die Produktseite der Depalettierungslösung (Japanisch)