Die chemische Industrie und deren Produkte sind äußerst vielschichtig. Zu den Produkten, bei deren Herstellung Industrieroboter häufig zum Einsatz kommen, zählen unter anderem Kunststoff, Synthesekautschuk, Kunstdünger, Papier und Kosmetikartikel.
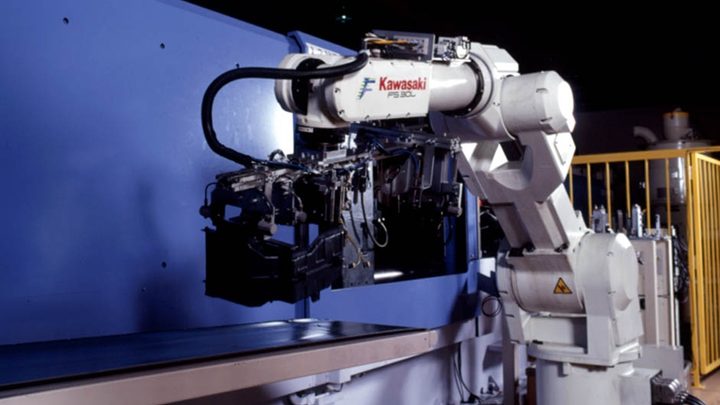
Kawasaki Roboter kommen beispielsweise häufig beim Be- und Entladen von Kunststoff-Spritzgussmaschinen sowie beim Palettieren von Kunstdünger und Wellpappe zum Einsatz.
Anwendungen
Palettierroboter

Materialhandhabung
Als Handhabung bezeichnet man einen Arbeitsvorgang, bei dem Material, Bauteile oder Produkte von einem Ort an einen anderen Ort verbracht werden. Diesen Arbeitsvorgang findet man nicht nur im verarbeitenden Gewerbe, sondern in nahezu allen Industriezweigen vor.
In vielen Industriezweigen kommen dabei Industrieroboter besonders häufig zum Einsatz, wenn es um den zügigen Transport kleiner Bauteile oder die Handhabung großer Bauteile geht, die aufgrund ihres hohen Gewichts nicht von Menschenhand transportiert werden können.

Maschinenbeschickung
Die Vorgänge des Be- und Entladens sind für die Maschinenindustrie unverzichtbar. Unter diese Kategorie fällt beispielsweise das Beschicken von NC-Maschinen und das Entfernen der Teile nach der Bearbeitung. Das Zuführen von Bearbeitungsmaterial für Schmiedemaschinen und Pressen fällt ebenfalls unter den Begriff Be- und Entladen.

Palettieren
Unter der Palettierung versteht man einen Arbeitsvorgang, der beim Versand und in der Logistik des verarbeitenden Gewerbes häufig anzutreffen ist und bei dem beispielsweise Kisten, Beutel oder Flaschen auf eine Palette gepackt werden. Das Gegenstück hierzu ist die Depalettierung, bei der Produkte geordnet von einer Palette abgeladen werden.
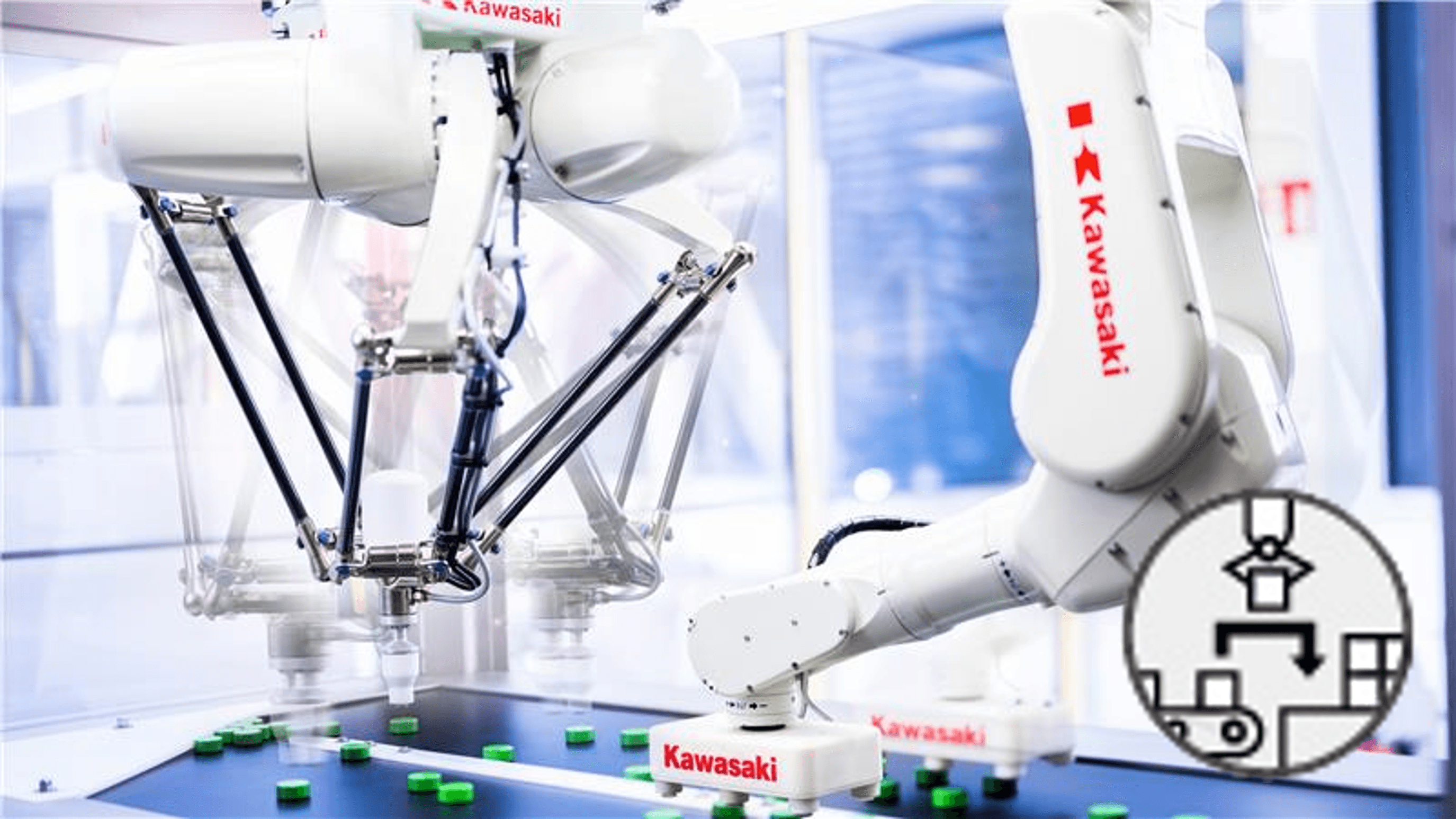
Pick & Place
Das Picking, auch als „Pick-and-Place“ bezeichnet, ist ein Vorgang, bei dem auf einem Förderband befindliche Werkstücke mit hoher Geschwindigkeit aufgenommen und sortiert werden.
Hierbei werden Roboter einer speziellen Bauart eingesetzt, die man als Parallelkinematik bezeichnet. Diese Roboter werden auch Delta-Roboter genannt.