In recent years, interest in humanoid robots has been growing rapidly around the world.
Kawasaki Heavy Industries, however, began its research and development of humanoid robots back in 2015—well before the current surge of attention. Nearly a decade has passed since then, marked by continuous improvements and steady progress. As a result, Kaleido 9 has emerged as the ninth generation in this ongoing evolution.
Humanoids Are Not All-Purpose. That’s Exactly Why Their Role Is Now Clear
Dedicated machines and industrial robots are highly rational solutions for processes with predefined tasks and production lines that require strict takt time control.
Even so, there are situations where the use of a humanoid robot makes clear sense.
For example:
- Equipment, tools, and even stairs designed for humans can be used as they are
- There is no need to prepare or redesign the environment specifically for robots
- Humanoids can operate flexibly in situations where tasks are difficult to predict in advance, such as disaster response sites
We believe that the greatest value of humanoid robots lies in the concept of “adapting robots to the human world,” rather than forcing humans to adapt their environments to robots.
Key Evolutionary Points of Kaleido 9
01. Structural Design That Dramatically Enhances Fall Resistance
Kaleido 9 features significant structural enhancements compared with the previous generation, Kaleido 8.
With commercial deployment in mind, the leg structure has been redesigned to strictly comply with component ratings. By increasing movement speed while maintaining torque, the legs can now respond more quickly when the robot loses its balance.
This ability to step out rapidly and regain stability has dramatically improved overall robustness—an attribute that Kawasaki Heavy Industries considers fundamental to the design of its humanoid robots.
02. Autonomous Walking That Sees, Judges, and Walks
Kaleido9 is capable of autonomous walking while continuously recognizing and understanding its surroundings.
In the demonstration, Kaleido 9 was shown making human-like decisions in real time—detecting and avoiding people and obstacles, recognizing steps on stairways, and automatically adjusting its stride to avoid stepping on edges and corners. This autonomous walking capability is supported by LiDAR (Light Detection and Ranging)-based self-localization using SLAM (Simultaneous Localization and Mapping).
03. An Intuitive Remote Control Solution Designed for Real-World Applications
Fully autonomous humanoids equipped with AI still face many technological challenges. Rather than pursuing full autonomy all at once, Kawasaki Heavy Industries envisions a set of realistic, step-by-step approaches.
These include:
- Remote-controlled operation, allowing humans to directly intervene when needed
- Hybrid operation, where humans handle high-level tasks while routine or simple tasks are delegated to AI
Kaleido 9 supports intuitive, real-time remote operation through a head-mounted display and has already been demonstrated in disaster response scenarios, highlighting its potential as a practical real-world solution.
More Than Just Walking: The Idea Behind the Kaleido Station
Another distinctive feature of Kaleido 9 is the Kaleido Station.
This mobile platform is designed to enable efficient long-distance travel on level ground using wheels, while Kaleido itself stands up and performs tasks once it reaches the work site.
Looking ahead, the Kaleido Station is also planned to function as a charging station. By combining the strengths of both humanoid and wheeled mobility, Kawasaki Heavy Industries is pursuing a realistic and practical approach to social implementation.
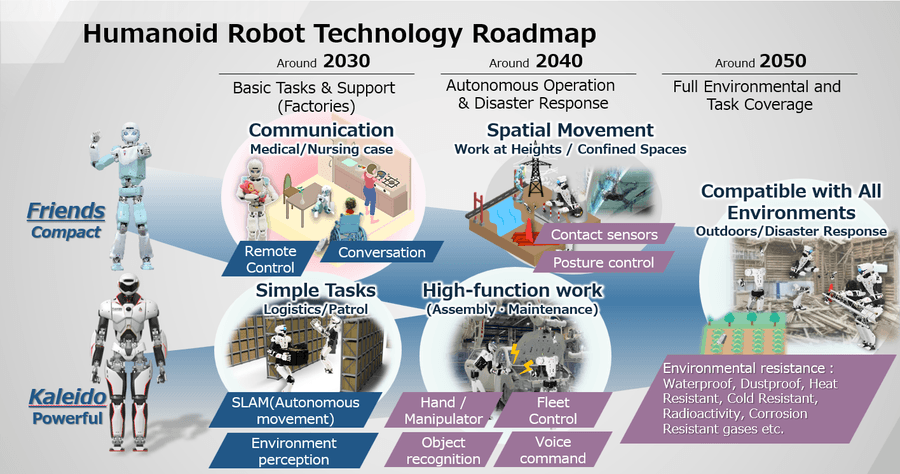
A Technology Roadmap for Humanoids: Evolving Step by Step
Humanoid robots will not suddenly become capable of doing everything autonomously.
Kawasaki believes that the implementation of humanoids in society will progress in stages.
Around 2030: Independent Operation and Support in Factories and Other Environments
Around 2030, humanoid robots are expected to be used primarily in controlled environments such as factories and plants. In these settings, they will perform independent work under remote control and support people in their daily operations.
At this stage, the key technologies required will be the fundamental elements that connect humans and robots. These include remote operation, conversational interaction, voice-based instructions, SLAM for autonomous mobility, and environmental awareness. One of the major advantages of humanoid robots is their ability to use equipment and tools originally designed for humans without modification. In this model, humans remain responsible for decision-making, while robots leverage their physical capabilities to carry out tasks.
Main application scenarios include:
- Communication support in medical and nursing care settings
- Simple tasks such as transportation and patrol duties
Key technologies and capabilities required:
- Environmental awareness
- Remote operation
- Conversational interaction and response to voice instructions
- SLAM-based autonomous mobility
Around 2040: Autonomous Operation in Unstructured Environments and a Broader Range of Applications
Looking ahead to around 2040, humanoid robots are expected to be capable of operating autonomously in unstructured environments while continuously recognizing and understanding their surroundings. Their applications are envisioned to expand into more complex and highly dynamic workplaces, including tasks performed at heights, in confined spaces, and at disaster response sites.
This phase will require a wide range of advanced technologies, such as enhanced environmental awareness, posture control, contact sensing, dexterous hand control, object recognition, and swarm control. In addition to core capabilities like autonomous mobility and environmental perception, advanced control technologies that directly enable task execution will play a key role in supporting these applications.
Main application scenarios include:
- Spatial mobility in challenging environments, such as work at heights and in confined spaces
- High-performance tasks, including assembly and maintenance
Key technologies and capabilities required:
- Response to voice instructions
- Contact sensors
- Environmental awareness
- Posture control
- Hand control
- Swarm control
- Object recognition
Around 2050: Toward Humanoids for All Environments and Tasks
By around 2050, the goal is for humanoid robots to evolve into systems capable of responding flexibly to all environments and tasks, both indoors and outdoors. At this stage, in addition to technologies that enable operation across diverse environments, a high level of environmental resistance will be essential. This includes resistance to water and dust, as well as tolerance to heat, cold, radiation, and corrosive gases.
The essential value of humanoid robots lies in their ability to move and operate in the same environments as humans, carrying out tasks on their behalf—even in situations where the nature of the work cannot be clearly defined in advance.
Main application scenarios include:
- Operation in all environments, including outdoor and disaster response settings
Key technologies and performance required:
- Environmental resistance, such as waterproofing, dustproofing, heat resistance, cold resistance, radiation resistance, and resistance to corrosive gases
The Ultimate Goal: Disaster Response Sites
The ultimate destination for Kawasaki’s humanoid development is disaster sites. Japan is prone to natural disasters, and the need to respond to situations that cannot be foreseen in advance. Kaleido 9 is a solid step towards the future.