
Con 50 anni di esperienza nella robotica, Kawasaki ha accumulato un’ampia gamma di tecnologie applicative in ogni campo e settore. Supportiamo le esigenze dei clienti di automatizzare le loro linee di produzione e migliorare la produttività. Gli esempi applicativi qui riportati forniscono solo una breve panoramica della nostra vasta esperienza.
Elenco delle applicazioni
Assemblaggio
Il processo di combinazione di più parti per realizzare componenti o prodotti, l'assemblaggio viene eseguito in vari settori manifatturieri, inclusi macchinari, elettronica ed elettrico.
L'assemblaggio copre varie attività, compreso l'assemblaggio di piccoli pezzi di precisione e pezzi grandi e pesanti.

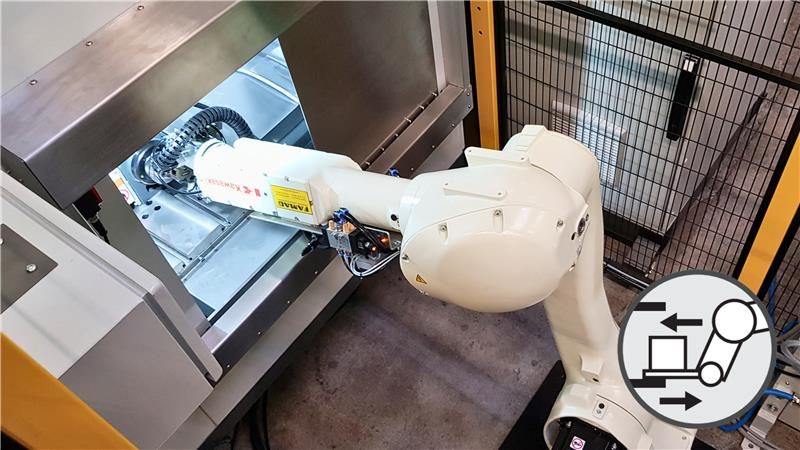
Movimentazione dei materiali
Il processo di spostamento di materiali, parti e prodotti da un luogo all'altro, la movimentazione dei materiali viene eseguita in quasi tutti i settori, non solo nell'industria manifatturiera.
Per la movimentazione dei materiali, i robot industriali sono più comunemente utilizzati per vari scopi, compreso il trasporto ad alta velocità di piccole parti e la movimentazione di oggetti pesanti che gli esseri umani non possono trasportare.
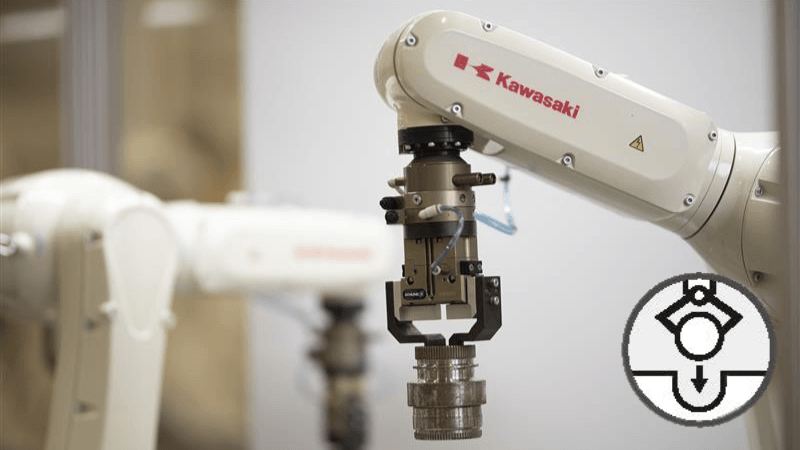
Tendenza macchina
Un processo critico nell'industria dei macchinari, l'assistenza alle macchine comporta il caricamento di parti in macchine utensili a controllo numerico e il loro scarico al termine della loro lavorazione. Anche il carico e lo scarico dei materiali di lavorazione dentro e fuori dalle macchine di forgiatura e pressa sono classificati come asservimento delle macchine.

Pallettizzazione
Il processo di impilamento di scatole, sacchi, bottiglie e altri prodotti su pallet, la pallettizzazione viene comunemente eseguita per la spedizione nell'industria manifatturiera e nell'industria della logistica. D'altra parte, la depallettizzazione è il processo opposto, in cui i prodotti vengono scaricati dai pallet in ordine.
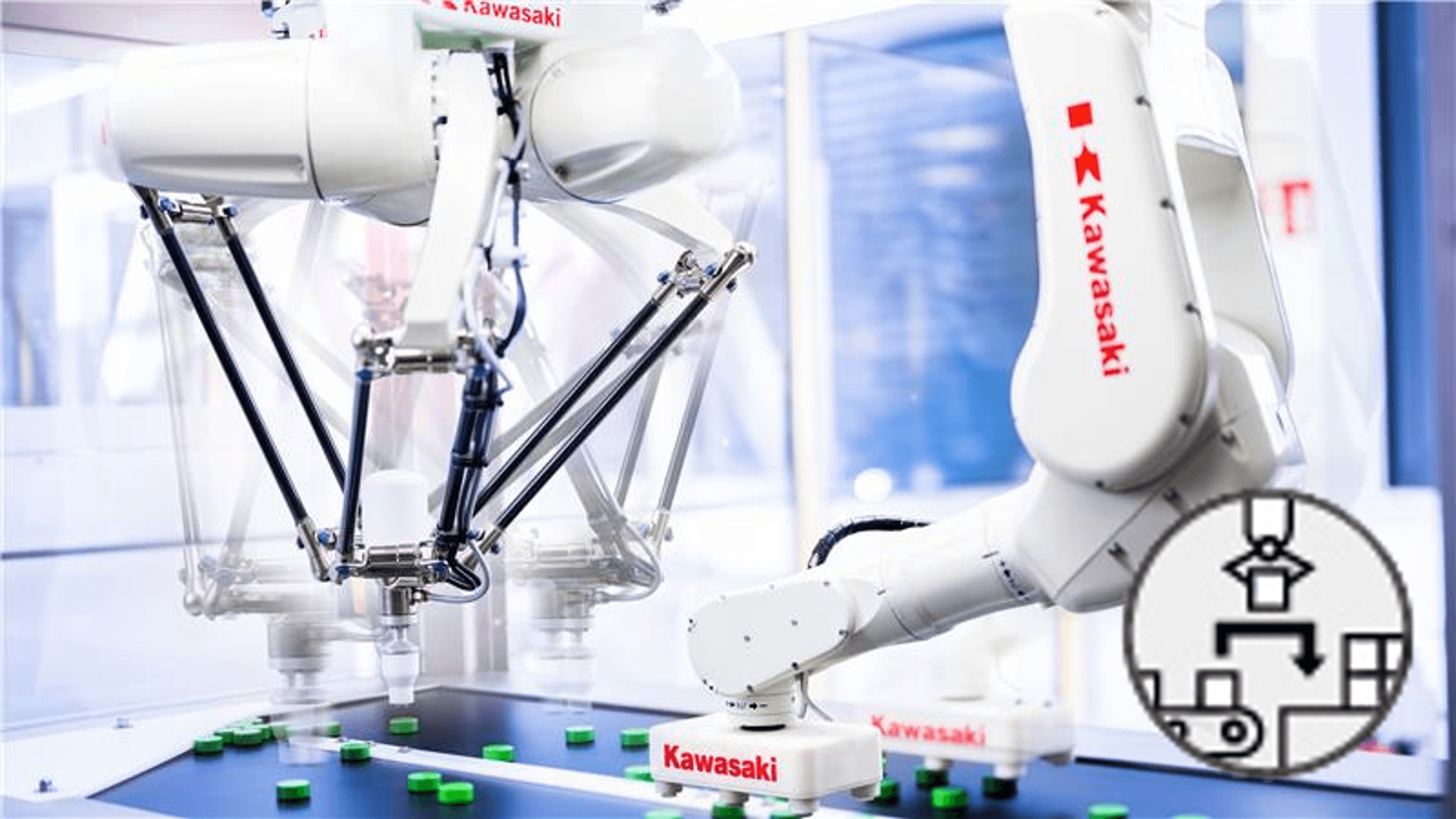
Pick & Place
Il prelievo, noto anche come "pick and place", è il processo di presa dei pezzi da un nastro trasportatore e di smistamento ad alta velocità.
A tale scopo vengono utilizzati robot di forma unica chiamati tipo collegamento parallelo (o tipo delta).
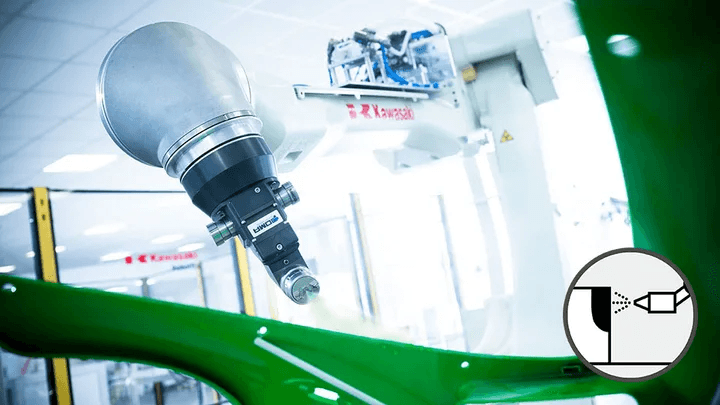
Pittura
La verniciatura è il processo di applicazione della vernice sulle superfici del prodotto, formando una pellicola di rivestimento o una finitura.
Poiché la maggior parte dei materiali vernicianti sono altamente volatili, per questo processo vengono utilizzati robot e apparecchiature di verniciatura a prova di esplosione.

Sigillatura / erogazione
La sigillatura è il processo di applicazione di sigillante o adesivo per migliorare l'ermeticità e riempire lo spazio tra i materiali.
La sigillatura viene eseguita per molti prodotti, come autovetture ed elettrodomestici.

Rimozione del materiale
La molatura e la sbavatura è il processo di rimozione delle bave sporgenti dalle superfici dei prodotti fusi e forgiati, nonché dalle superfici post-saldatura.
Coinvolgendo la rimozione delle bave con una smerigliatrice, questo processo può essere sporco, pericoloso e impegnativo in cui i robot possono svolgere ruoli importanti.

Saldatura ad arco
Il metodo di saldatura che utilizza la scarica ad arco per unire materiali metallici, la saldatura ad arco è ampiamente utilizzato nelle industrie di macchinari, metalli e automobili. Robot e saldatrici ad arco vengono utilizzati per unire i materiali mentre li fondono.
Saldatura a punti
La saldatura a punti, nota anche come saldatura a resistenza elettrica, è il processo di saldatura di due materiali di base applicando corrente elettrica con un'asta dell'elettrodo e sciogliendoli con il calore di resistenza. La saldatura a punti è così comunemente usata per saldare piastre di acciaio di carrozzerie di automobili che un gran numero di robot viene utilizzato nell'industria automobilistica.
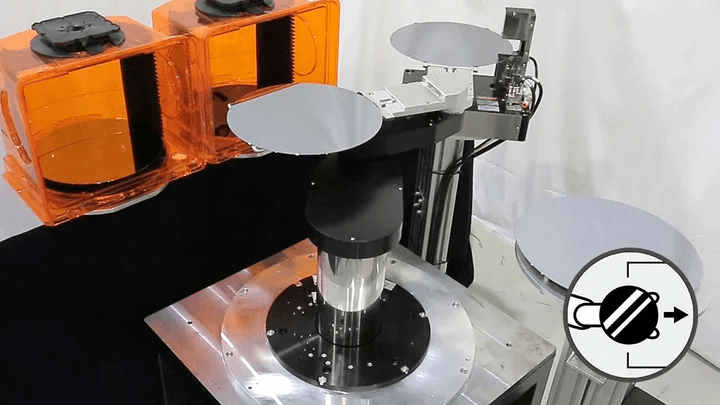
Manipolazione di wafer di silicio
Il trasferimento di wafer è la gestione dei wafer nel processo di front-end delle apparecchiature per la produzione di semiconduttori.
Questo processo utilizza robot puliti e richiede movimenti fluidi, ad alta precisione e ad alta precisione.