Kawasaki Robotics 以「發揮人類的智慧,創造豐富未來的機器人」為目標,長期致力於開發可讓機器人與人共存的技術。這種共存的終極形式就是人型機器人 – 能夠用兩條腿移動,並用兩隻手臂執行任務,使其具有承擔傳統上由人類完成的工作所需的多功能性。
本文將介紹川崎人型機器人從第一代原型機到第八代機器人的發展歷程。
川崎人型機器人研發的起源
製造出日本第一台工業機器人的川崎公司,長期以來在工廠生產線的工業機器人領域居於領先地位。憑藉半個多世紀以來開發和製造工業機器人的經驗,川崎還擴展到以人為中心的機器人領域,創造出在傳統工廠單元之外提供價值的系統。其中包括專為在人類身旁安全工作而設計的 duAro 雙臂協作式機器人,以及消除傳統機器人教學困難的遠端協作系統 Successor。
作為這些努力的最終延伸,川崎正在開發人型機器人。
由於人型機器人使用兩條腿行走,並使用兩隻手臂執行任務,因此具有高度的自由度,並有潛力承接傳統上由人類執行的工作。
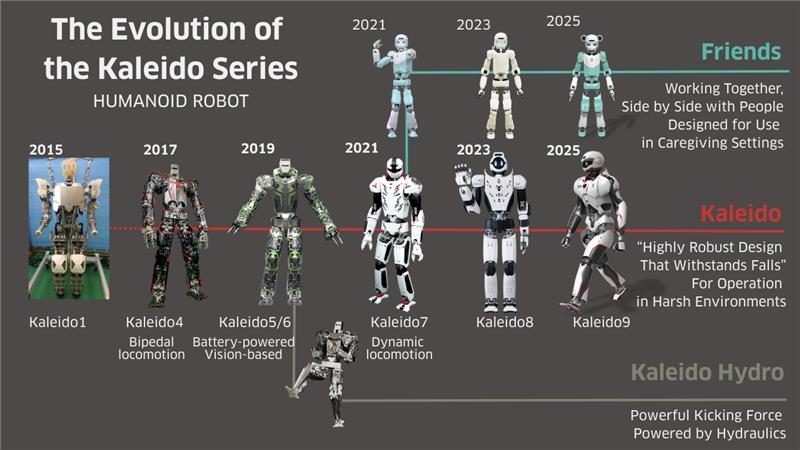
2015 – 第一個原型
Kawasaki 在 2015 年左右開始研發人型機器人。對於一家長期專注於工業機器人的公司來說,創造一個能夠進行雙足動作的機器人是一項重大挑戰。
為了決定如何在機械上重現類人的形態,團隊首先探討了電機和關節機構應該如何排列組合。然而,當我們對人體解剖學的研究越深入,就越意識到人體的複雜性和靈活性。這轉變了我們的設計理念:不再嘗試直接複製人體動作,而是只提取人體的基本功能,並使用馬達和機械結構來重新創造它們。這種理念上的轉變最終使得穩定的雙足行走得以實現。
工業機器人和人型機器人最大的差別之一就是它們必須承載的負荷。典型的工業機器人有效負載為 100 公斤,重量通常超過 600 公斤,其設計目的是要舉起比自身還輕的物件。相比之下,仿人機器人必須舉起比自身重量更重的負荷,因此極限地去減輕其重量就變得非常重要。

第一個原型的腿部剛性不足,尤其是膝蓋機構容易扭轉,導致行走不穩定。
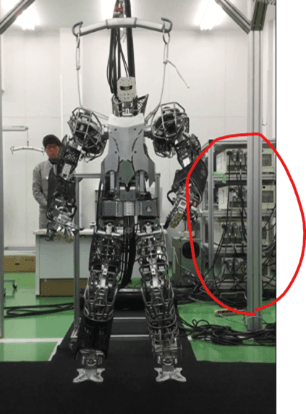
在第三個原型之前,他們使用的是專為工業機器人設計的 E型控制器。然而,該控制器體積龐大,控制週期太慢,不適合人型應用,而且需要四個獨立的單元,這意味著光是控制器就佔據了相當大的空間。這些問題後來都解決了,先是過渡到 F型控制器,最後是專用的人型機器人控制器。
摔倒對人型機器人構成最大的風險,因為摔倒可能導致機器人嚴重受損。為了確保機器人能夠承受這樣的意外,我們進行了反覆測試,故意讓機器人跌倒,同時進行可控的斷裂跌落動作。
2017 – 首次在 iREX 公開亮相
川崎在2017 年國際機器人展 (iREX 2017) 上公開亮相Kaleido,展示了站立動作和引體向上等動作。
- 高度:175 公分
- 重量:85 公斤
- 電源:外部系留電源
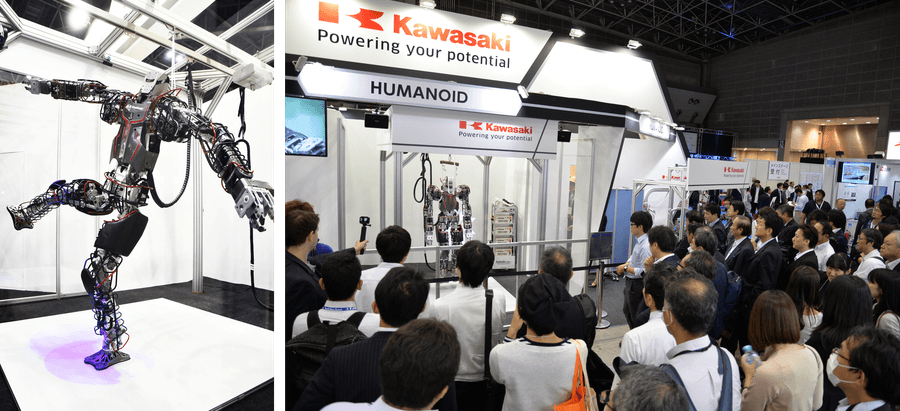
幕後花絮:
機器人直到展覽前一晚才出現突發問題,迫使團隊考慮是否大幅縮短演示時間。
但經過最後一輪的調整後,在開幕當天成功地進行了完整的展示。

雖然改用 F 型控制器讓系統變得更精巧,
,但重量仍高達 30 公斤,遠遠超過安裝在人型機器人內的重量。
2019 – 電池整合與輕量化設計之路
Kawasaki 發表了其第一個完全無系縛的雙足步行示範,並配備了板載電池。當時,Kaleido 高 178 公分,重 85 公斤。在維持這個重量的同時,研究團隊以精巧、高效能的放大器和馬達驅動器取代了四個外部控制器,並將所有電氣元件整合到機器人的機身內。透過採用板載電池作為電源,Kaleido 實現了完全獨立的操作。
為了在不增加整體重量的情況下實現獨立運作,我們進行了大量的開發工作。首先是骨架和外觀設計。結構組件採用比鋁更輕的鎂合金。此外,金屬框架的外部面板以 3D 列印的樹脂零件取代,大幅減輕重量。內部生產樹脂部件也大大加快了原型開發週期。
除了這些重大的改進之外,團隊還進行了無數的增量減重改進。有時候,組件在減輕之後變得太脆弱,迫使團隊將它們還原為更堅固、更重的版本。要預測哪些地方會出現問題極為困難,因此團隊透過不斷的試驗和錯誤,反覆製造、測試和改良設計。
步行控制的開發和客製化力感測器
一旦硬體達到成熟度,團隊便開始開發進階的步態控制。人類機器人通常依賴腳踝處的6 軸力/扭力感應器,但商用感測器有以下特點:
- 精度高
- 太重
- 昂貴
- 易受震動破壞
對於執行踏步、跺腳或跳躍動作的人形機器人而言,輕巧且抗震的感應器是必要的。因此,Kawasaki 開發了客製化的6 軸力/力矩感測器,專為人類步行進行最佳化。

2021 – 推出 “Friends
相較於功能強大且堅固耐用的 Kaleido,Friends系列著重於更輕薄、更平易近人的類人型裝置,專為狹小空間以及未來在照護與日常生活輔助方面的潛在角色而設計。
友善、平易近人的設計
Friends 的設計採用柔和的彎曲線條,因此可以自然地融入人類環境,例如住家和照護設施。為了營造友善的印象,機器人的眼睛使用了顯示器,讓它可以像人類一樣表達情感。Friends」這個名字反映了這個專案背後的理念 – 一個能真正成為人們朋友的機器人。
會話與手勢互動
我們與大阪大學的 Nagai 實驗室合作,開發了會話和手勢互動功能。這是我們在人型機器人中的首次嘗試。利用人工智慧,Friends 可以對使用者提出的問題做出口語回應。與此同時,Friends 也會在回答問題時同步做出手勢,實現更類似於人類的溝通。

在 National Museum of Emerging Science and Innovation 舉辦的活動中,Friends 回答了觀眾席上小朋友的問題。儘管對話的品質並尚未完美,但會場座無虛席,機器人幽默的互動經常引來觀眾的笑聲。
2023 – 實現穩定行走
川崎同時升級了軟體和硬體,增加了即時的腳步調整功能,在平衡受到干擾時糾正落地位置。這大大降低了摔倒的風險,並提高了穩定性。
人型機器人的未來展望
機器人可望協助人類處理危險、環境較髒亂或體力要求高的工作。然而傳統型機器人擅長重複事先教導好的工作,這使得他們在處理無法事先預測的工作時可能面臨的挑戰。
如果人型機器人可以遠端操作,就可以在危險的現場接手風險高任務,而操作人員則可以安全地留在市區,從世界任何地方控制機器人。這種能力在災難應變情境中特別有價值,因為進入不穩定的地形和對人類來說非常危險也有滋生事故的風險。
川崎重工致力於實現人型機器人與您並肩工作的未來。