Odkąd Kawasaki Heavy Industries wyprodukowało pierwszego robota przemysłowego w Japonii w 1969 roku, jesteśmy wiodącym producentem robotów i pracowaliśmy nad rozwojem motoryzacji i innych branż w Japonii i na całym świecie. Poniżej przedstawiamy naszą ponad 50-letnią historię w robotyce przemysłowej.
1968
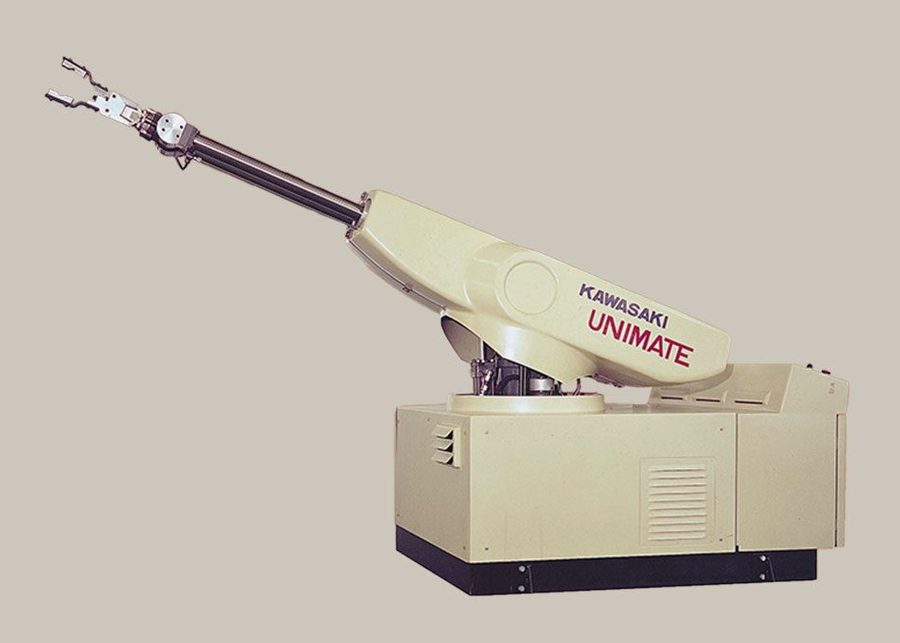
Podpisana umowa licencyjna z Unimation (USA)
1969

Rozpoczęcie komercyjnej produkcji pierwszego robota przemysłowego Unimate w Japonii
1981
Rozpoczęcie produkcji robota elektrycznego (seria P)
1983
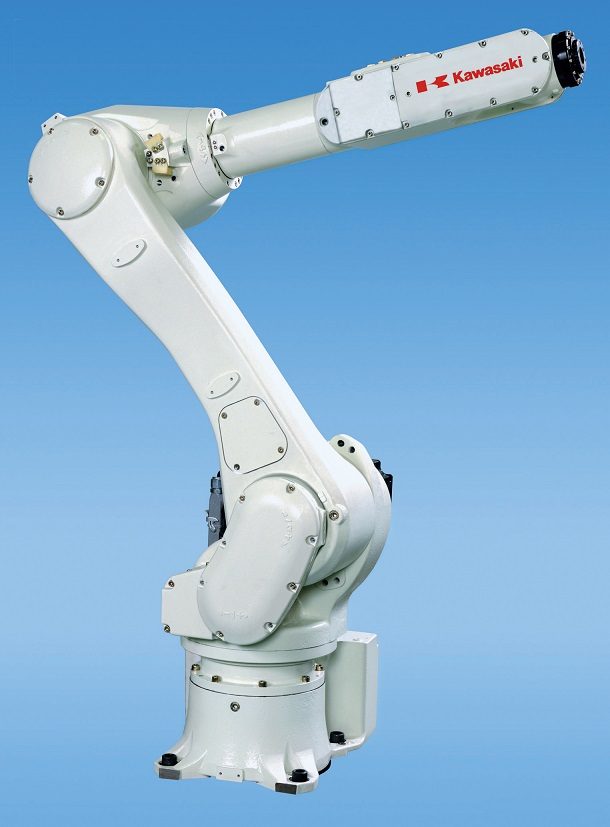
Wprowadzenie na rynek dużego robota ogólnego przeznaczenia (seria E)
1986
Zerwał współpracę z Unimation i rozpoczął własny rozwój i globalną ekspansję
1989

Wprowadzenie małego i średniego robota ogólnego przeznaczenia (seria J)
1990
Założenie lokalnej filii Kawasaki Robotics (USA), Inc. w Detroit, USA
1992

Wprowadzenie na rynek dużego robota ogólnego przeznaczenia (seria U)
Wprowadzenie całkowicie cyfrowego kontrolera (seria AD)
1995
Założenie lokalnej filii Kawasaki Robotics GmbH w Neuss w Niemczech.
Zakład Akashi (Dział Robotów) uzyskał certyfikat ISO9001
1996
Założenie lokalnej filii Kawasaki Robotics (UK), Ltd. w Wielkiej Brytanii
1997
Wprowadzenie całkowicie cyfrowego kontrolera (seria C)
Rozszerzył biznes czystych robotów
1998

Wprowadzenie małego i średniego robota ogólnego przeznaczenia (seria F)
Zakład Akashi (Dział Robotów) uzyskał certyfikat ISO14001
1999

Założenie lokalnej filii Kawasaki Machine Systems Korea, Ltd. w Incheon w Korei
Wprowadzenie na rynek dużego robota ogólnego przeznaczenia (seria Z)
2000

Przejęcie biznesu robotów malarskich od Kobe Steel, Ltd.
Wprowadzenie robota czystego typu przegubowego poziomego (seria NS)
2002

Uruchomiony robot malarski (seria K)

Wprowadzenie robota ogólnego przeznaczenia o bardzo dużej ładowności (seria M)
Wprowadzony kontroler robota (seria D)
2003

Wprowadzenie na rynek robota czystego typu przegubowego poziomego (seria NX)
2004
Opracował i wprowadził nową technologię FSJ (Friction Spot Joining)
2006
Założenie lokalnej filii Kawasaki Robotics (Tianjin) Co., Ltd. w Tianjin w Chinach
2007
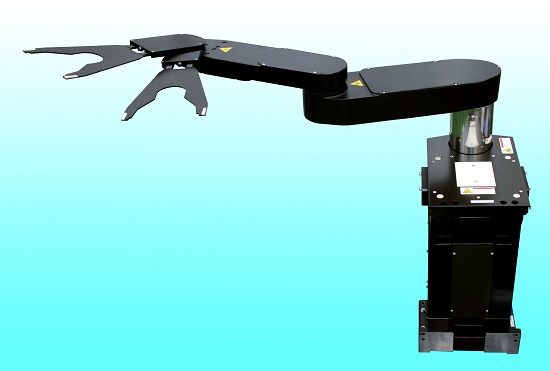
Wprowadzenie na rynek robota czystego typu przegubowego poziomego (seria NT)
2008
Wprowadzenie małego i średniego robota ogólnego przeznaczenia (seria R)
Wprowadzenie wysokowydajnego kontrolera (seria E)
2009

Uruchomiony robot do kompletacji (seria Y, picKstar)
2011

Wprowadzenie robota do zgrzewania punktowego (seria BX)
2013
Założenie Medicaroid Corporation w celu opracowania robotów medycznych
Wprowadzone roboty do zastosowań medycznych i farmaceutycznych (MC004N, MS005N)
2015

Wprowadzenie na rynek robota o bardzo dużej ładowności, MG10HL

Wprowadzenie na rynek dwuramiennego robota SCARA „duAro”, który może współpracować z ludźmi podczas pracy
2017

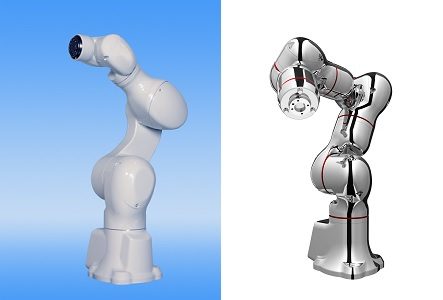
Wprowadzenie na rynek szybkich robotów o małym udźwigu, RS007N i RS007L

Wprowadzono nowy system robota „Następca”, który odtwarza ruchy wykwalifikowanych pracowników poprzez zdalną koordynację
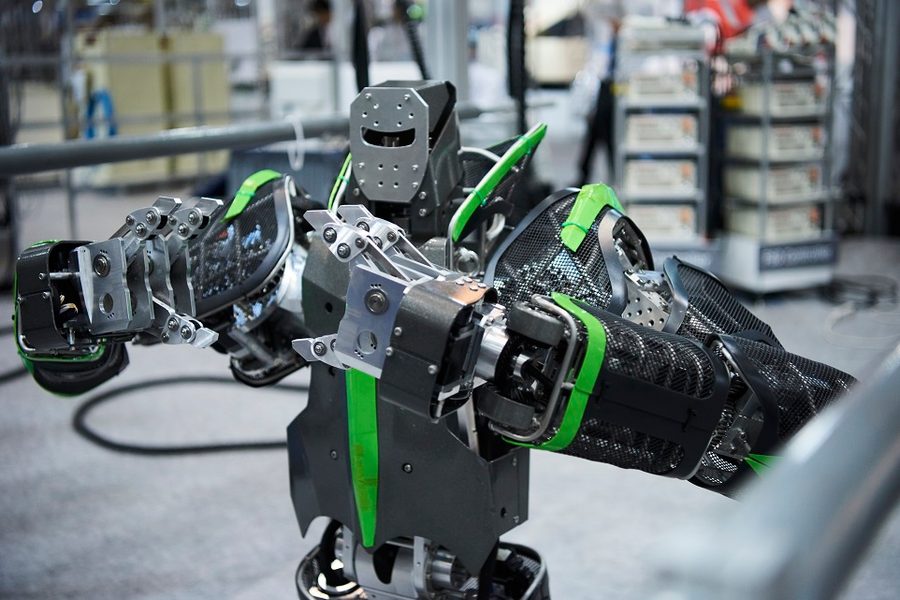
Pierwszy debiut humanoidalnego robota „Kaleido” na Międzynarodowej Wystawie Robotów
2018

Obchodzimy 50. rocznicę działalności naszej robotyki

Wprowadzenie współpracującego dwuramiennego robota SCARA, duAro 2
2019

Opracował humanoidalnego robota „Kaleido” do praktycznych zastosowań w prawdziwym życiu
About

O Dziale Robotów
Roboty Kawasaki są używane w różnych sektorach, w tym motoryzacyjnym, elektrycznym i elektronicznym.

Lokalizacje
Posiadamy sieć lokalizacji i wsparcia w UE i Afryce.
Historia
Poniżej przedstawiamy naszą ponad 50-letnią historię w robotyce przemysłowej.

Kawasaki Heavy Industries Sp.
Jesteśmy wszechstronną firmą inżynieryjną z ponad 100-letnią historią, oferującą technologie, które obsługują szerokie obszary biznesowe obejmujące ląd, morze i powietrze.

Certyfikaty ISO
Dowiedz się o naszych certyfikatach ISO.

Kariera
Dowiedz się o informacjach o zatrudnieniu.