自2015年開始開發以來,川崎人形機器人平台(以下簡稱「RHP」)研發的Kaleido已經出現了各種新版本。為了快速將 Kaleido 開發的技術回報社會,我們目前正在開發兩款機器人作為 Kaleido 的衍生。它們分別是修長苗條的人形機器人「Friends」和用四腳行走的機器人「Bex」。開發這兩款機器人的真正目的是什麼?我們在這篇訪問了開發負責人 Masayuki Kamon(工程博士)。
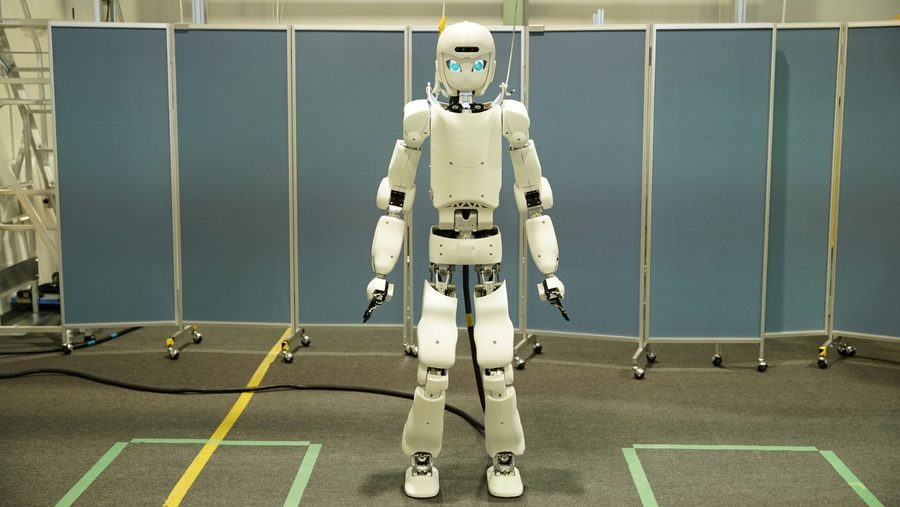
人類共存型人形機器人RHP Friends(以下簡稱「Friends」)
ー 請告訴我們 RHP Friends 的開發背景。
在川崎,我們正在與日本產業技術綜合研究所合作,共同開發能改善日本的人形機器人技術。什麼樣的人形機器人是對日本工業有用處的呢?
我們曾假設災難救援是 Kaleido 在社會中實際運用的案例,但在工廠中實施上可能會更快。在工廠內也不是讓他製造大量生產的產品,而是請他執行如高附加價值產品的組裝之類的工作。這些工作我們難道不能使用人形機器人來完成嗎?
在這樣的工作場所,人們經常需在狹小的空間裡彎曲身體等姿勢來執行任務。有時還要沿著狹窄的通道行走才能到達工作地點。然而,實際操作的工作本身只是擰緊螺絲之類的重複性工作。在這種情況下,單看此作業的話機器人可以比人類做得更好。
然而,為了能夠在這些地方執行工作,人形機器人必須是修長的型態。它必須是靈活的,並且設計得能夠安全地與人類一起工作,即使它翻倒也不能損壞周圍的設備。雖說有力氣總是好的,但這份工作其實不需要太多的力氣。像這樣的機器人肯定也有機會在飛機引擎、燃氣渦輪機和化工廠等地方發揮作用。
我們之前開發 Kaleido 的目標是擁有穩健性和強大的功能。因為這目標,Friends計畫的起源使我們決定開發一種機器人,它有一個纖細的身體,可以沿著狹窄的路徑行走,而且設計得讓周圍的人覺得它很溫柔。

ー 請告訴我們 Kaleido 向 Friends 傳遞的重點,以及有何不同之處。
川崎50年的工業機器人技術和設計概念不僅傳承給了Kaleido,也傳承給了Friends。我們也遵循了 Kaleido 的設計技術。
就不同點而言,首先是更纖薄的外形。為了實現這一目標,我們使用高品質且小型的馬達來減輕重量。 Kaleido 的重量約為 80 公斤,而 Friends 的重量只有 55 公斤左右。因此小型馬達可安裝在Friends的纖薄機身中。Friends身高在160公分左右,Kaleido約180公分,因此Friends更為嬌小。
我們雖然必須以更纖薄的設計為目標,但川崎身為工業機器人製造商,我們不能製造很快就會損壞的東西。在《Friends》中川崎則達到工業使用所需的品質和更纖薄的設計之間的良好平衡。
此外,由於 Friends 的設計初衷是與人類協作,因此它還融入了協作機器人的概念,例如當人們靠近時手不會被機器人夾到。
ー 這種設計也是一種不會讓機器人周圍的人感到害怕的設計。
是的,確實如此。這對於與人類的協作工作當然是必要的,因為我們相信,未來人們對機器人的需求將不僅僅是勞動力。
例如,雖AI人工智慧持續發展,但當你跟AI說“這些花很漂亮呢。”人工智慧也不能和你一起走出門去。
然而,配備人工智慧的人形機器人可以與人一起生活。我們相信,這樣的場景甚至可能在用於勞動力之前成為現實。我們在人們對《Friends》的接受度上做出了特別的努力,例如外觀和臉部表情。

ー【Friends將在iREX2022(2022年國際機器人展覽會)上首次展出。告訴我們展會上的注意事項。
我們將展示在護理環境中的實際應用,並進行演示,讓Friends推著輪椅與老年人交談。Friends也會進行娛樂表演,它會出現在舞台上並隨著音樂跳舞。
本次演示的關鍵技術點是動態捕捉技術。人類首先展示一個動作,然後機器人重現動作。
之前我們在電腦上編程來操作機器人。然而這項工作不再是必要的,因為直觀的程式設計將成為可能。這次我們選擇跳舞是因為我們希望人們看到《Friends》的動作,但使用動作捕捉進行教學可以在多種情況下使用。
四腳機器人RHP Bex(以下簡稱「BEX」)
ー RHP Bex 也是首次亮相。請介紹一下開發的背景。

透過Kaleido的開發,我們感受到了兩條腿行走的機器人的困難。由於人形機器人具有與人類相同的形態,因此它們有可能最終能夠做人類所能做的一切,並且具有很強的多功能性。然而,我們可能還需要很長時間才能看到它們的實際用途。
另一方面,我們也正在開發輪式自主移動的服務機器人Nyokkey,大約一年後就能進入示範測試階段。它可以在短時間內開發出來,但當到不平坦地面上的移動時,腿必然比輪子更適合。人形機器人和 Nyokkey 之間須有一個新領域。我們認為該領域也可能存在商機。
正是因為這個原因,我們開始開發四腳行走的 機器人Bex 。我們相信,我們為人形機器人開發的步行技術一定也適用於四腳機器人。
ー Bex會用在什麼場景下?
首先,我們假設輕負載,例如在建築工地運輸材料。我們目前正在進行開發,目標是最大有效載荷 100 公斤。
另一個領域是檢查。一種可能的使用方法是 Bex 在工廠的大片區域巡邏,並透過檢查遠端位置的攝影機影像來檢查測量儀器的當前狀態。另一種可能的使用方法是 Bex 運送人們在農田上收穫的農作物。
川崎重工將這款 Bex 定位為人形機器人之一,目前正在推進其開發。四足機器人已經出現,但像人形一樣擁有手臂的機器人並不多。我們相信,這就是川崎一直致力於人形機器人開發的四足機器人的意義所在。
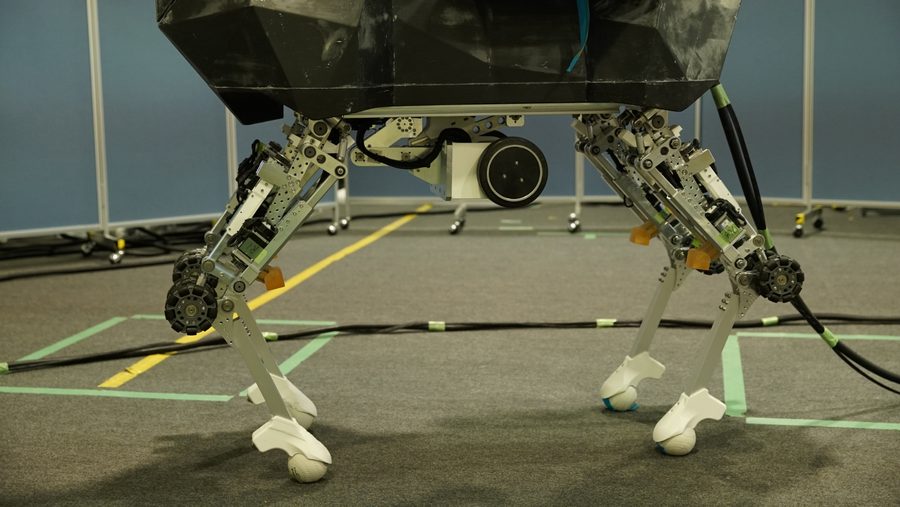
另一方面,儘管底座是人形機器人,但Bex的上半部並不是固定的。我們希望繼續使其適應各種應用。我們將建立合作關係,並將上半部留給其他合作夥伴,在建築工地的情況下,這些合作夥伴可以是建築公司,在工廠中使用的情況下,可以是設備製造商。川崎將重點放在構成身體下半部的四條腿,我們希望將其作為一個開放的創新平台提供。
ー 請告訴我們 iREX 的 Bex 展覽需要注意的事項。
Kaleido 重 80 公斤。它的兩條腿可支撐80公斤的重量。相反,Bex 有四條腿,可能能夠支撐 160 公斤的重量。我們將在 Bex 上演示人類駕駛。在 iREX,您不僅可以參觀 Kaleido,還可以參觀它的兄弟姐妹 Friends 和 Bex。