Ever since starting the development in 2015, there have been various new versions of the Kawasaki Robust Humanoid Platform (hereinafter called “RHP”) Kaleido. In order to quickly return the technology developed in Kaleido to society, we are currently developing two robots as derivatives of Kaleido. These are the slim type humanoid robot “Friends” and the “Bex” robot that walks on four legs. What was the real intention behind the development of these two robots? We interviewed the person responsible for the development, Masayuki Kamon (PhD in Engineering).
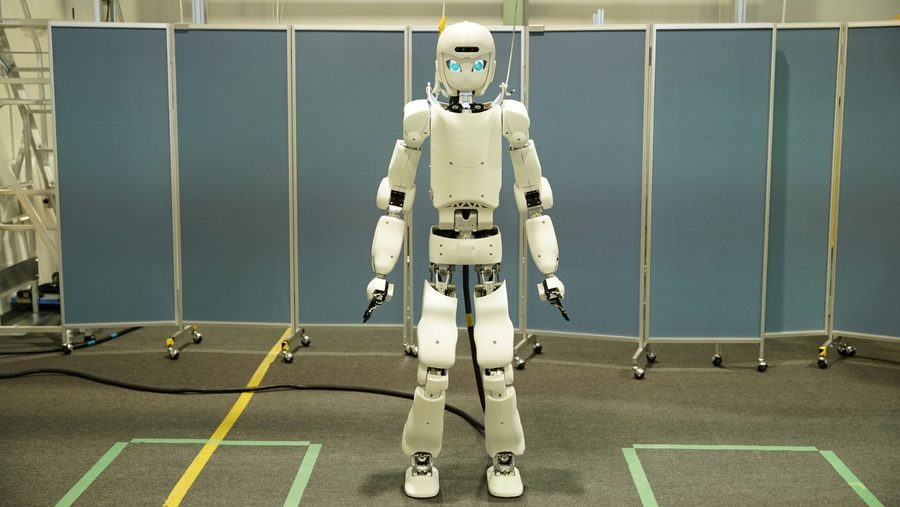
Human coexistence type humanoid robot RHP Friends (hereinafter called “Friends”)
ー Tell us the background leading to the development of RHP Friends.
At Kawasaki, we are working with the National Institute of Advanced Industrial Science and Technology on joint development for the improvement of the humanoid robot technology in Japan. What kind of thing is a humanoid robot that will be useful for the Japanese industry?
We had assumed disaster rescue as one example for the implementation of Kaleido in society, but implementation in factories could be even quicker. Even within a factory, we are not talking about the manufacturing of mass produced items, but rather works such as the assembly of products with high added value. Wouldn’t it be possible to use humanoid robots for this work?
In workplaces such as that, there are often humans bending their bodies flexibly in tight spaces to perform the tasks. It is also sometimes the case that it is necessary to travel along narrow passageways just to get to the site of the work. However, the work itself is only plain and easy tasks such as tightening screws. In such cases, robots can do better than humans.
However, to be able to perform work in such places, a humanoid robot would have to be a slender model. It would have to be flexible and designed to be safe for working together with humans, and it must not damage the surrounding equipment even if it fell over. It is always good to have strength, but this work does not actually require very much strength. There must surely also be opportunities for a robot such as this to be useful for aircraft engines, gas turbines and places such as chemical plants.
What we were previously aiming for with our development of Kaleido was robustness and power. In response to this, the origin of the Friends project was when we decided to develop a robot that would have a slim body that could travel along narrow paths, and also a design that the people around would consider it to be gentle.

ー Tell us the points that have been passed on from Kaleido to Friends, and also what points are different.
Know-how and design concepts from 50 years of industrial robots at Kawasaki have been passed on, not only to Kaleido, but also to Friends. We have also followed the designing technology for Kaleido.
For the points of difference, the first is the slimmer profile. To achieve this, we use high-quality and compact motors to reduce the weight. Kaleido weighs around 80 kg, but Friends is only around 55 kg. Furthermore, the compact motors make installation in the slim body of Friends possible. The height is also around 160 cm tall, Friends is smaller than Kaleido, which is about 180 cm.
We have to aim for a slimmer design, but we also have the pride of Kawasaki as a manufacturer of industrial robots, so we cannot make something that would soon break. We pursued a fine balance on Friends between the quality necessary for use in industry and a slimmer design.
Furthermore, as we assume collaborative work with humans, the concept of collaborative robots is one of the features of Friends, such as not trapping a human’s hand as he or she gets close.
ー The design is also one that will not make the people around the robot feel afraid.
Yes, that’s true. That is of course necessary for collaborative work with a human, but also because we believe that what people will demand of robots in the future will go beyond just labor.
For example, when AI advances further, when you talk to “These flowers are pretty, don’t you think?” but the AI cannot go out somewhere with you.
However, a humanoid robot equipped with AI could live together with people. We believe that scenarios such as that might even become reality before use for labor. We made a particular effort for the acceptance of Friends by people, such as external appearance and facial expressions.

ー Friends will be exhibited for the first time at iREX2022 (International Robot Exhibition 2022). Tell us the points to look out for at the exhibition.
We will showcase a practical application in a nursing care setting and will give a demonstration where Friends will push a wheelchair and have a conversation with an elderly person. Friends also play an entertainment performance where it will appear on the stage and dance with music.
The key technical point for this demonstration is the motion capture technology. A human shows a movement first and then the robot reproduces that movement.
Previously we programmed on a computer to operate a robot. However, this work is no longer necessary, as it will become possible to program intuitively. We chose dancing this time because we wanted people to see the movement of Friends, but teaching using motion capture can be used in a variety of situations.
Four-legged robot RHP Bex (hereinafter called “BEX”)
ー The RHP Bex is also something that will be revealed for the first time. Tell us the background of the development.

Through the development of Kaleido, we felt the difficulty of robots that walk on two legs. Because humanoid robots have the same form as humans, they have the possibility of eventually being able to do everything that humans can and having great versatility. However, it will probably still be a long time before we see their practical use.
On the other hand, we are also developing the service robot Nyokkey that moves autonomously on wheels, and are able to move to the demonstration testing phase in about a year. It was possible to develop it in a short period of time, but when it comes to mobility over uneven ground, it is inevitably legs that are more appropriate than wheels. There must be an area in between a humanoid robot and Nyokkey. We thought that there may also be business opportunities in that area.
It was for that reason that we started the development of the Bex robot that walks on four legs. We believe that the walking technology we have developed for humanoid robots will definitely also be applicable to four-legged robots.
ー What kind of situations will Bex be used in?
First, we are assuming light payloads such as transporting materials in a construction site. We are currently conducting the development with the target of a 100 kg maximum payload.
Another area is inspections. A possible method of use would be for Bex to patrol around the vast area of a plant and to check current state of measuring instruments by checking the camera images from a remote location. Another possible method of use would be for Bex to transport the crops that people have harvested on agricultural land.
Kawasaki has positioned this Bex as one of the humanoid robots and is currently advancing its development. There are already four-legged robots, but there are not many robots with arms like a humanoid. We believe that this is the significance of working on four-legged robots at Kawasaki, which has been striving for the development of humanoid robots.
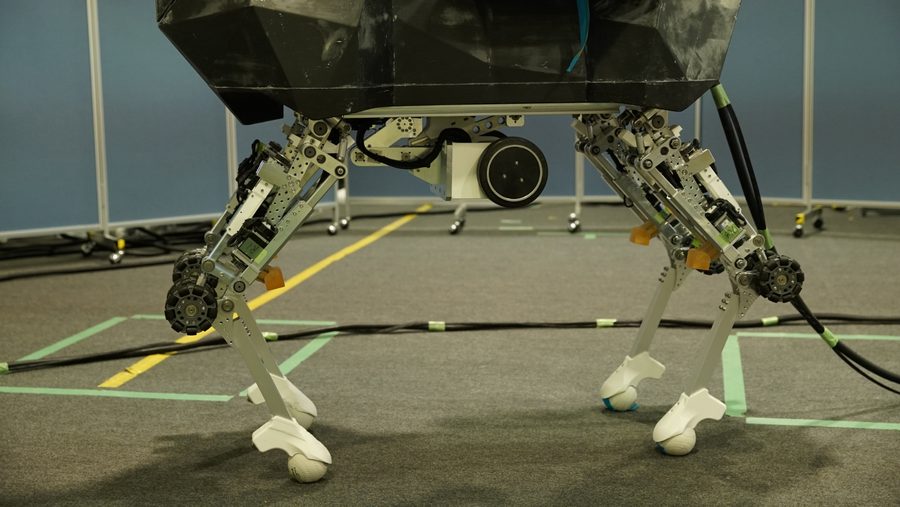
On the other hand, even though the base is a humanoid robot, the upper half of Bex is not fixed. We want to go on to adapt it to various applications. We will form partnerships and leave the upper half up to the other partners, which could be a construction company in the case of a construction site, or a plant manufacturer in the case of use in a plant. Kawasaki will focus efforts on the four legs that form the lower half of the body and we want to offer it as an open innovation platform.
ー Tell us the points to look out for in the Bex exhibit at iREX.
The Kaleido weighs 80 kg. Its two legs support 80 kg. On the contrary, Bex has four legs, which are potentially capable of supporting 160 kg. We will demonstrate a human ride on the Bex. At iREX, come and see not only Kaleido, but also to its sibling Friends, and to Bex.