“Kaleido” is a humanoid robot that brings together the technologies of Kawasaki, which has been producing industrial robots for more than half a century. We started the development of Kaleido in 2015 and announced the first generation in 2017. Ever since then, we have continued to produce new versions and the 7th generation, the RHP7 (Robust Humanoid Platform 7), will be launched at iREX2022 (International Robot Exhibition 2022). We spoke to the person responsible for the development, Masayuki Kamon (PhD in Engineering) about the main points to watch on the latest Kaleido version.
What is Kaleido?
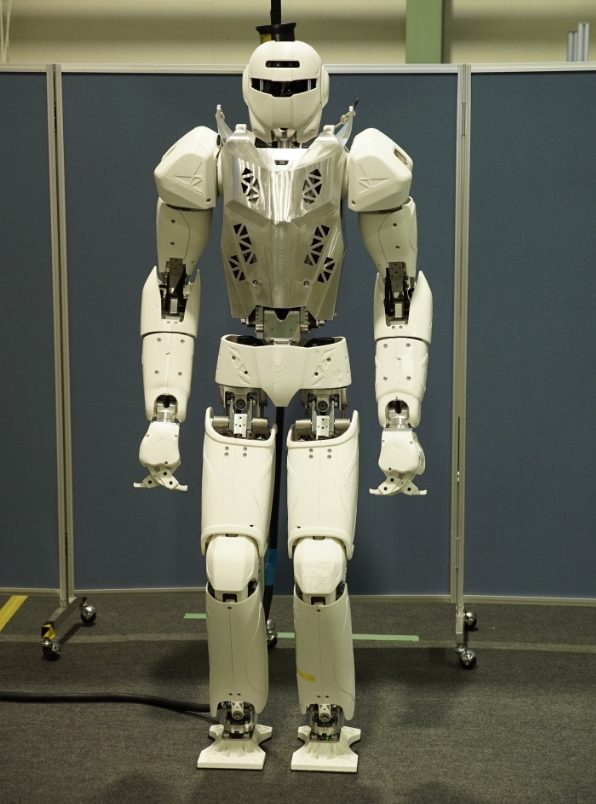
“Kaleido” is the humanoid robot (human type robot) that Kawasaki is researching and developing. It has a high level of durability based on the technologies of Kawasaki, which has a history of over 50 years in the industrial robot sector. It has a physical size roughly equivalent to that of an adult human, but has a robust structure such that it does not break even if it falls over. We are aiming for its practical application in the future. It is 180 cm high and weighs 80 kg.
What is different about the 7th generation Kaleido?
ー Tell us about the key points of the improved 7th generation Kaleido.
On the previous versions, we were first aiming to realize Kaleido walking on two legs. Although we succeeded in that, ordinary persons expect humanoid robots to move naturally in the same way as humans. We had not yet reached that level on the previous Kaleido.
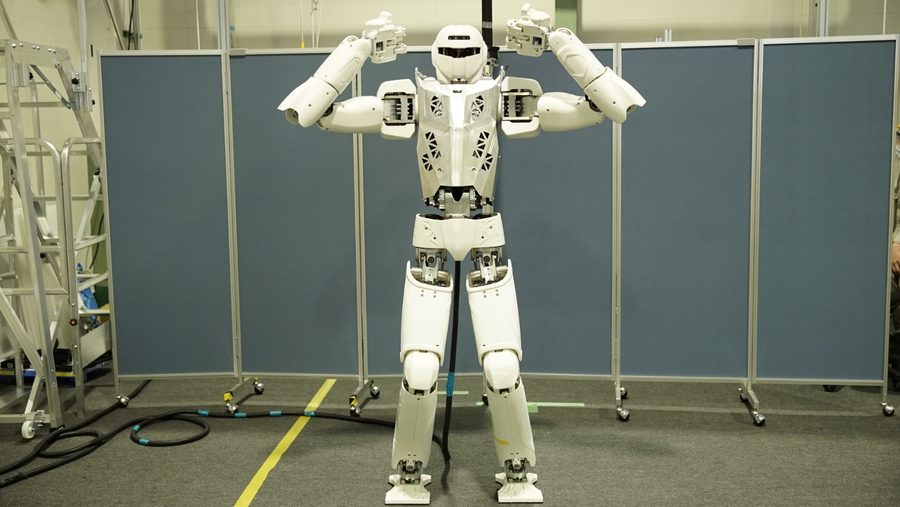
What we were pursuing in this update of Kaleido were the aspects of “walking and moving like a human”. At the iREX this time, I would like the visitors to pay attention to the natural and quick movements of the RHP7.
ー What does it mean specifically by walking and moving like a human?
In engineering theory, robots that walk on two legs can only walk while bending their knees. However, humans can walk easily with their knees straight. Also, humans land on their heels and push off with their toes to walk. This is just something we take for granted, but it is an operation that is very difficult to perform with the foot of a robot, which is made with a rigid body.
Among these constraints, we succeeded in having Kaleido walk at a speed of 4 km per hour, which is the average walking speed of humans. If you watch the RHP7 walking, you should get a sense of how it walks more smoothly than before.
The background to this achievement of quick walking is a technology called “dynamic behavior support”. As the opposite of this, “static behavior support” is to ensure that when standing on two feet, the center of gravity is always in the center of the body. When walking, this must be done slowly to achieve balance. On the other hand, with “dynamic behavior support”, it is possible to proactively perform movements so that the center of gravity shifts away from the leg that is supporting the body. The unstable state can be stabilized with the control to realize movements closer to that of humans.

Robustness to be able to fail
ー Tell us the key points in the development.
First was what I just said about the control technology to stabilize the unstable state. In order to move in an unstable state, work is necessary to first predict what kind of instability will occur, and then to rapidly control that instability to stabilize. The technology required for that control is considerably advanced.
Also, the development is a steady work with repeated failures. The robot falls over multiple times during the development process, so it is very important that the body does not break. From the beginning, the RHP name is an abbreviation of Robust Humanoid Platform. Robust means strong and sturdy. It has a robust structure that is unlikely to break, but even so, the body may suffer damage when repeating tests where the balance is actively disturbed. For this reason, it was necessary to make improvements for a body that was even more difficult to break.
For an open platform to improve humanoid technology
ー Kaleido has come closer to human-like movements, so what are the things to watch out for at the iREX exhibition?
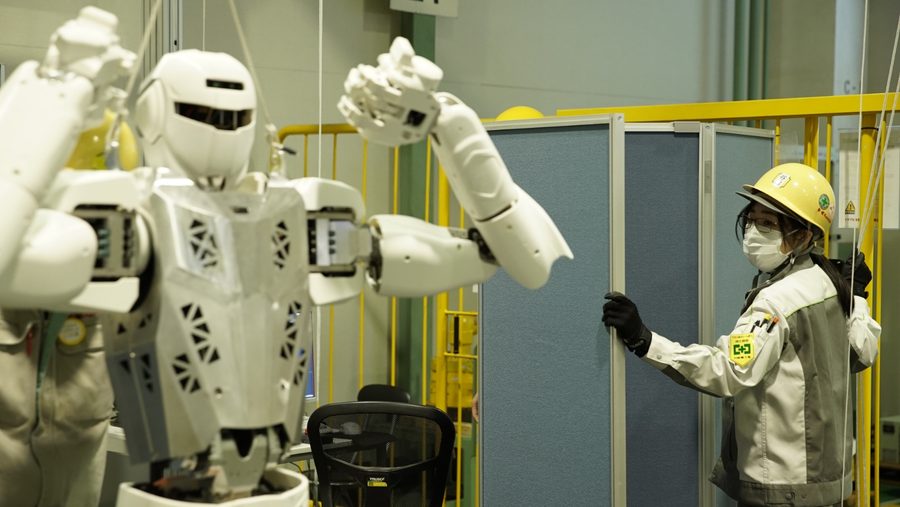
Our ultimate aim is the implementation of humanoid robots in society. To achieve this, we are asking what would happen if we had Kaleido perform work. Our exhibit assumes actual hazardous work.
The first of these is work in a high place in a construction site. At present, this high-place work is performed by humans. Even with a lifeline, it is still work that is dangerous. We would like robots to perform that kind of work. In the exhibition this time, Kaleido will be hoisted up and perform work in a swinging state.
In another exhibit, Kaleido goes up on a balance beam and maintains balance while walking. It jumps down from there. You can see the “dynamic behavior support” I just talked about in an easy way.
From now on, I want Kaleido to go beyond Kawasaki to proceed the development and to be implemented in society in collaboration with many universities and companies. If we can cooperate with partners to further develop the humanoid robot technology as a platform, we welcome both Japanese and foreign parties. I would definitely like researchers to feel the potential of Kaleido through this “dynamic behavior support”.
open-innovation space for robots
YouComeLab
Issues for robot development
There are demands for the implementation of robots in society for reasons such as labor force decline and the coronavirus crisis. On the other hand, there are various barriers to robot development, including the cost, auxiliary equipment, trouble support and repairs. Development is difficult at companies that are not robot manufacturers, and there have been issues such as that even if a robot manufacturer was requested to make a prototype, it was not possible to obtain the data for improvements.
YouComeLab ー A space where the development of new technology and new products can be conducted casually and easily with Kawasaki robots.
Kawasaki will establish YouComeLab as a venue for open innovation with institutions in various specialist areas, such as AI, machine learning, advanced sensors, advanced control, and new materials.
The planned installations at YouComeLab include the humanoid robot Kaleido and other Kawasaki robots such as the remote collaboration system, the Successor. It will be possible for institutions such as companies and universities to use these robots to pursue their development themselves.
Merits of YouComeLab
Robot and equipment use Free of charge
During startup and troubleshooting Regularly stationed experts will give in-person lectures
Sophisticated systems Joint trials with Kawasaki
This has been in operation in our Akashi Works since April 2021. A new one will be opened in Haneda, Tokyo in April 2022, and another one in Nagakute, Nagoya in fiscal 2022. In the future, we also want to establish overseas bases such as in Silicon Valley, Beijing, Paris and elsewhere. Kawasaki will promote collaborations with many partners to realize the society where humans and robots co-exist and mutually prosper.