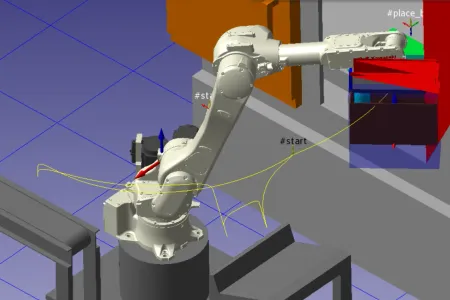
▼ Präzise Bewegungsbahnen und Taktzeiten ▼
Die von Kawasaki über viele Jahre entwickelte Technologie der virtuellen Robotersteuerung ermöglicht eine hochgenaue Reproduktion von Bewegungsbahnen und Taktzeiten.
▼ Unterstützt mehrere Roboter und externe Achsen▼
Sie können mehrere Roboter mit unterschiedlichen Controllern gleichzeitig simulieren.
Sie können auch externe Achsen, die vom Controller gesteuert werden, frei reproduzieren.
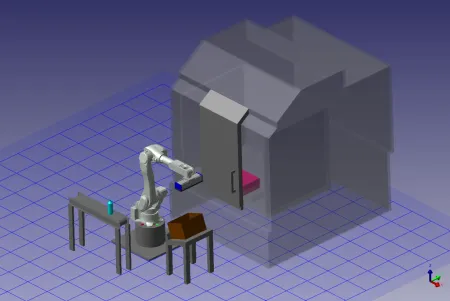
▼ Störungsprüfung, Layout-Überprüfung ▼
Vor der Installation auf dem eigentlichen Gerät können Sie vorab prüfen, ob es auf Ihrem PC Probleme mit Störungen oder dem Betriebsbereich gibt.
▼CAD-Datei-Import ▼
Er unterstützt standardmäßig den Import vieler Arten von CAD-Dateien, was Layout-Konstruktion und CAD-Programmierung deutlich erleichtert.
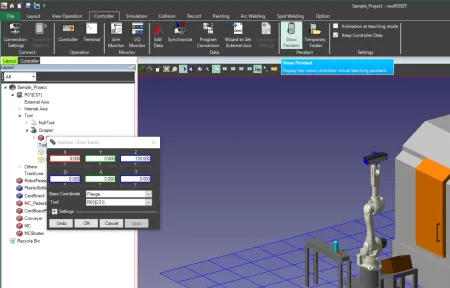
▼ AS-Editor ▼
Dies ist ein Editor, mit dem Sie auf einfache Weise Programme auf AS-Basis in Verbindung mit einem grafischen Bildschirm erstellen können.
▼ 3D-PDF-Erstellung ▼
Die Aktionen während der Simulation können in eine Datei ausgegeben und mit einem Standard-PDF-Reader in 3D wiedergegeben werden, für einfache Präsentationen und Informationsaustausch.
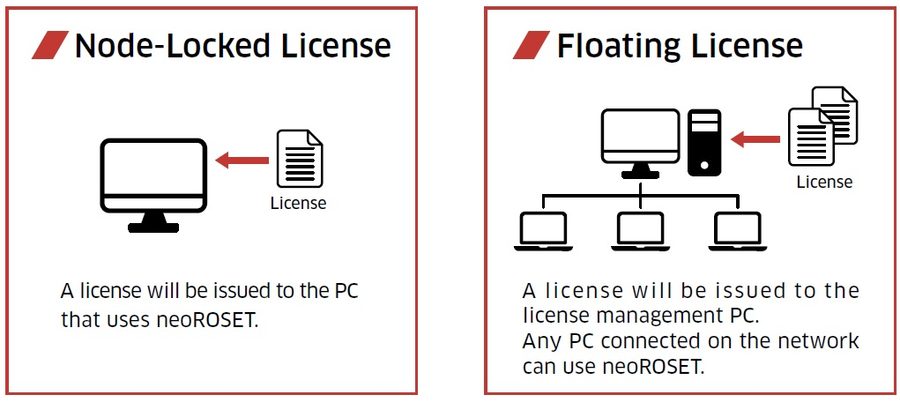
Abonnement
Es gibt zwei Arten von Softwarelizenzen: Node-Locked- und Floating-Lizenzen.
System-Anforderungen
| Artikel | Inhalt |
|---|---|
| Betriebssystem (OS) | Windows🄬10Pro×64/WIndows(R)10 Enterprisex64 Windows🄬11Pro×64/WIndows(R)11 Enterprisex64 Japanische Version / Englische Version / Chinesische Version / Deutsche Version |
| CPU | Intel Core i5 oder höher empfohlen |
| Speicher | Mindestens 8 GB RAM, 16 GB oder mehr empfohlen |
| Freier Speicherplatz | 30 GB oder mehr, Solid State Drive (SSD) empfohlen |
| Auflösung | 1920 x 1080 oder höher empfohlen |
| Grafikkarte | Intel UHD Graphics oder höher NVIDIA Quadro Serie empfohlen |
| Andere Anforderungen | Maus (mit Rad empfohlen) oder gleichwertiges Zeigegerät PDF-Reader wie Adobe® Acrobat® Reader |