로봇과 인간의 구조는 같은가요?
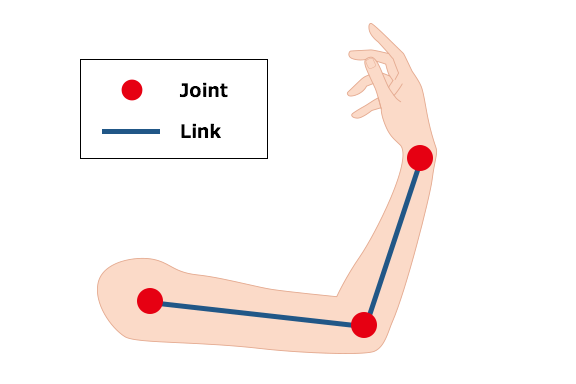
로봇과 인간은 공통된 특징을 공유합니다. 인간과 기계 로봇은 서로 반대되는 것처럼 보이지만 실제로는 링크(뼈)와 관절이라는 동일한 기본 구조를 공유합니다. 주로 로봇 팔로 구성되는 산업용 로봇의 기본 골격은 링크와 관절의 조합입니다. 사람의 신체에 비유하면 팔꿈치, 어깨 등 자유롭게 구부리고 움직일 수 있는 부분이 관절이고, 관절을 연결하는 뼈가 로봇의 링크에 해당합니다. 관절을 움직이고 링크를 통해 동력을 전달하는 원리는 인간과 로봇 모두에게 공통적입니다.
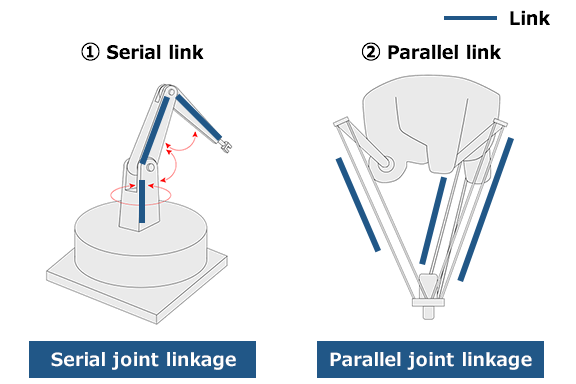
로봇은 링크의 배열 방식에 따라 크게 1) 직렬 링크와 2) 병렬 링크의 두 가지 유형으로 분류됩니다. 사람의 팔은 어깨, 팔, 손목 등 관절이 직렬로 정렬되어 있기 때문에 직렬 링크로 분류됩니다.
산업용 로봇은 관절의 움직임과 구조에 따라 수직 다관절형과 수평 다관절형(선택적 순응 조립 로봇 팔-SCARA) 등 여러 범주로 분류됩니다. 자세한 내용은 아래 기사를 참조하세요.
산업용 로봇에는 어떤 종류가 있나요? 주요 6가지 유형의 특징에 대한 가이드
이 글에서는 산업용 로봇의 동작과 내부 구성에 대해 설명합니다.
로봇과 사람의 동작 비교
이제 사람의 팔과 동일한 기계 구조를 가진 수직 다관절형을 예로 들어 동작을 살펴보겠습니다.
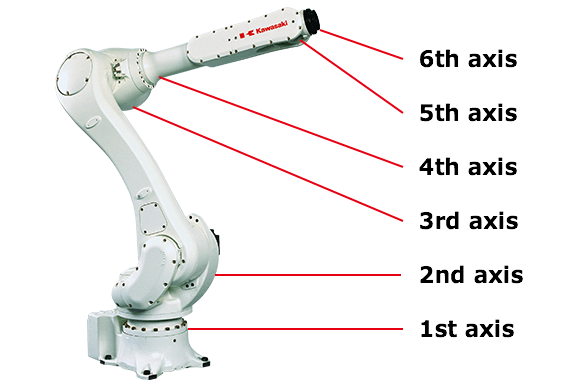
수직 다관절 로봇은 직렬 링크 구조를 가진 산업용 로봇입니다. 일반적으로 6개의 관절(6축)로 구성됩니다.
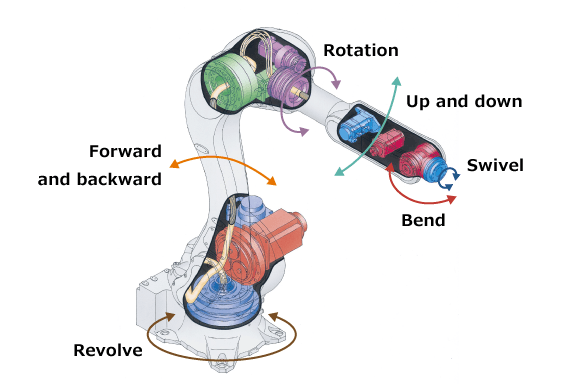
다음 그림은 로봇과 사람의 움직임을 비교한 것입니다.
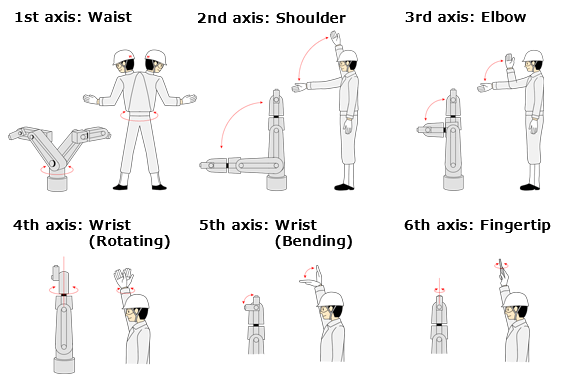
1~3번째 축은 허리와 팔, 4~6번째 축은 손목에서 손끝까지입니다. 처음 세 축은 손목을 특정 위치로 이동시키고, 다음 세 축은 손목을 자유롭게 움직입니다. 이 6축 구조 덕분에 로봇은 사람처럼 자유롭게 움직일 수 있습니다.
실제 움직임을 동영상으로 확인해 보겠습니다.
첫 번째 축부터 여섯 번째 축까지 모든 축이 사람처럼 움직입니다.
관절을 움직이려면 무엇이 필요할까요?
다음으로 산업용 로봇의 내부 구조를 자세히 살펴봅시다.
아래 그림은 가와사키 중공업, 즉 가와사키의 중소형 가반 하중 범용 로봇 ‘R 시리즈’의 구조를 보여줍니다. 이 R 시리즈는 전자기기 조립, 아크 용접 등 다양한 분야에서 활약하고 있습니다. 케이블과 하네스를 암 내부에 내장할 수 있어 주변 장비와의 간섭을 피할 수 있고 좁은 공간에서도 로봇을 사용할 수 있습니다. 이 로봇의 가장 큰 특징은 민첩한 움직임에 대응할 수 있는 빠른 작동 속도입니다.
이 그림에서 로봇은 여러 가지 부품으로 구성되어 있음을 알 수 있습니다. 그중에서도 특히 중요한 네 가지 부품인 액추에이터, 감속 기어, 인코더, 트랜스미션에 대해 개별적으로 설명하겠습니다.
액추에이터
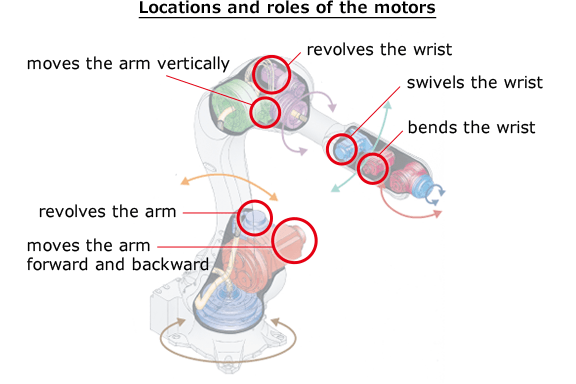
액추에이터는 로봇의 관절 역할을 하는 부품으로 로봇이 팔을 위아래로 움직이거나 회전할 수 있도록 하며 에너지를 기계적 동작으로 변환하는 역할을 합니다. 이 개념을 이해하기 어려울 수 있지만 모터를 예로 들어 설명하겠습니다. 아래 그림에서 빨간색 동그라미로 표시된 부분이 R 시리즈 모터의 위치입니다.
그러나 프라모델 키트에 사용되는 것과 같은 단순한 모터라면 예를 들어 0.01mm의 정밀한 움직임과 정확도가 요구되는 정밀한 동작을 수행할 수 없습니다. 따라서 산업용 로봇에는 위치 및 속도 제어가 가능한 서보 모터라는 고기능 모터가 사용됩니다.
액추에이터를 구동하는 가장 일반적인 에너지원은 전기이지만 유압 및 공압 에너지도 사용할 수 있습니다. 일부 유압식 액추에이터는 큰 힘을 생성할 수 있고 충격에 강하다는 점에서 독특합니다.
감속 기어
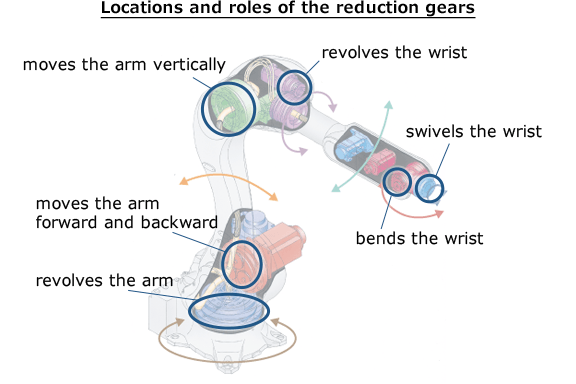
감속 기어는 모터의 출력을 높이기 위한 장치입니다. 모터만으로는 출력할 수 있는 힘의 양이 제한되어 있습니다. 큰 힘을 내기 위해 모터는 기본적으로 이 감속 기어와 함께 사용됩니다. 다음 그림에서 파란색 동그라미로 표시된 부분이 감속 기어입니다.
기어 수가 다른 톱니바퀴를 조합하여 모터의 회전을 10만큼 줄이면 모터의 출력은 10을 곱하게 됩니다. 이것은 자전거 변속기와 같은 원리입니다. 자전거는 앞바퀴와 뒷바퀴에 서로 다른 크기의 기어가 있습니다. 일반적으로 변속기는 뒷바퀴의 기어를 변경하는 데 사용됩니다. 큰 기어를 선택하고 바퀴 회전 수를 최소화하면 속도를 희생하더라도 페달링이 쉬워지고 가파른 언덕을 오르는 것도 훨씬 덜 어렵습니다. 즉, 출력 파워를 높일 수 있습니다.
인코더
인코더는 모터의 회전축의 위치(각도)를 나타내는 장치입니다. 엔코더가 있으면 로봇이 어떤 방향으로 얼마나 움직이는지에 대한 가시적인 데이터를 제공할 수 있습니다. 일반적인 광학 엔코더는 모터의 회전축에 디스크가 부착되어 있습니다. 디스크에는 빛이 통과할 수 있도록 일정한 간격으로 슬릿이 있고, 디스크 양쪽에는 발광 다이오드(LED)와 수광 소자(포토다이오드)가 있어 빛의 세기(밝음과 어두움)를 구분합니다.
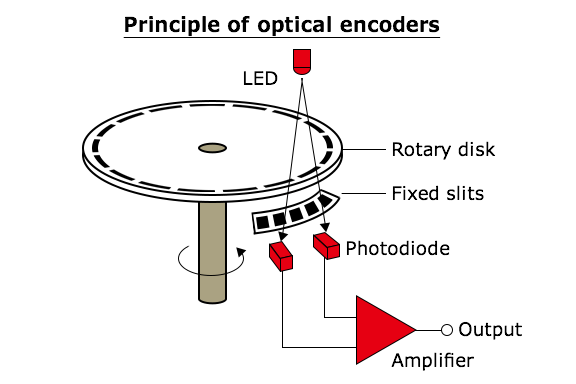
모터가 회전할 때 빛이 슬릿을 통과하거나 차단되므로 신호를 읽어 회전 각도와 속도를 결정할 수 있습니다. 이를 통해 서보 모터는 위치와 속도를 정밀하게 제어할 수 있습니다.
트랜스미션
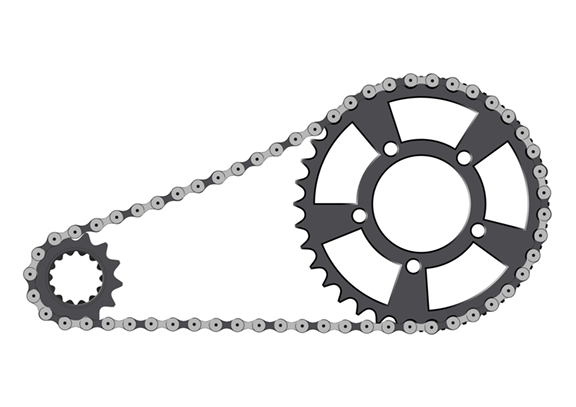
트랜스미션은 액추에이터와 감속기에서 생성된 동력을 전달하는 부품입니다. 또한 변속기는 동력의 방향과 크기를 변경할 수 있습니다. 앞서 자전거를 예로 들자면 크랭크와 뒷바퀴를 연결하는 체인이 변속기입니다. 자전거는 페달의 회전 운동을 변속기를 통해 뒷바퀴로 전달하여 구동됩니다.
이 아이디어는 로봇의 구조에도 적용됩니다. 로봇에 사용되는 모터는 일반적으로 관절 근처에 배치되지만 벨트나 기어와 같은 전달 메커니즘을 사용하여 관절에서 멀리 떨어져 배치할 수도 있습니다. 예를 들어 R 시리즈 로봇의 손목에서는 전도 메커니즘을 통해 팔의 팔꿈치 부분에 모터를 설치할 수 있기 때문에 컴팩트한 손목을 구현할 수 있습니다.
교체 가능한 엔드 이펙터로 기능 추가하기
인간은 도구를 사용하여 다양한 작업을 수행할 수 있습니다. 산업용 로봇의 경우 손목에 부착된 장치를 교체하면 로봇의 활용도가 높아져 다양한 작업을 수행할 수 있습니다. 이 장치를 ‘엔드 이펙터’라고 하는데, 물건을 들어올리는 손, 진공(흡입) 타입, 용접 및 도장용 도구 등 다양한 종류의 엔드 이펙터가 준비되어 있습니다. 로봇의 샤프트가 구현하는 유연한 움직임과 작업별 엔드 이펙터를 결합하여 매우 다양한 작업을 수행할 수 있습니다.
이번 기사에서는 산업용 로봇의 기본 구조에 대해 자세히 알아보았고, 이를 통해 구조를 구성하는 부품의 위치와 역할에 대해 알아봤습니다. 직장에서 로봇을 구현할 때 로봇이 어떻게 구성되는지 알거나 배울 필요가 없다고 생각할 수도 있습니다. 하지만 로봇의 축 개수를 보고 어떤 종류의 움직임과 작업이 가능한지, 로봇을 회사에서 어떻게 활용할 수 있는지 등 전반적인 개요를 파악하는 것이 도움이 될 수 있습니다. 교육을 고려하고 있는 기업이라면 가와사키 로봇 사업부 웹사이트에서 각 산업용 로봇에 대한 자세한 제품 정보와 적용 사례를 확인할 수 있습니다.
실제로 로봇 도입을 고려할 때 산업용 로봇의 구조와 움직임에 대한 약간의 지식만 있어도 보다 적합한 구현에 큰 도움이 될 수 있습니다.