
비전으로 다양한 크기의 박스 포장 작업을 자동화한 사례를 소개합니다.
오늘날의 노동 시장은 변화하고 있습니다. 글로벌 컨설팅 기업 딜로이트는 2028년까지 미국에서 240만 명의 제조업 인력이 부족할 것으로 예측하고 있습니다*. 노동자를 고용하는 것이 점점 더 어려워짐에 따라, 각 기업들은 자동화를 통해 인력 부족을 보완하고 비즈니스 성장에 필요한 힘과 유연성을 확보하기 위해 자동화를 활용하고 있습니다.
인력 부족 문제를 해결하기 위해 미국 미시간주에 위치한 가와사키 로봇 인증 SIer인 Midwest Engineered Systems(이하 MWES)가 구축한 ‘봉지 식품의 박스 포장 공정 자동화’를 소개합니다. 로봇과 소프트웨어를 사용한 전용 패키지 셀을 설계하여 당초 목표를 뛰어넘는 결과를 얻었습니다.

도입 배경 / 박스 포장 작업의 과제
●불안정한 노동력으로 인해 변동이 심한 생산 체제
●다양한 제품 종류와 다양한 박스 크기(박스 포장 작업의 부담 감소)
●전체 설비 가동률 85%에서 분당 50박스 처리가 요구됨
고객사는 노동력 확보가 어려워 생산 체제가 불안정해짐에 따라 박스 포장 작업과 같은 단순 작업에서 인력에 의존하지 않는 자동화 솔루션을 원했습니다. 다품종 및 다양한 박스 크기를 처리할 수 있는 콤팩트한 이동식인 동시에 향후 사업 성장에 대비하여 장비 구성 변경 및 기능 확장이 가능한 셀을 원했습니다.
도입 효과/솔루션:
<로봇을 통한 원격 조작으로 힘든 조리 작업의 노동력 절감>
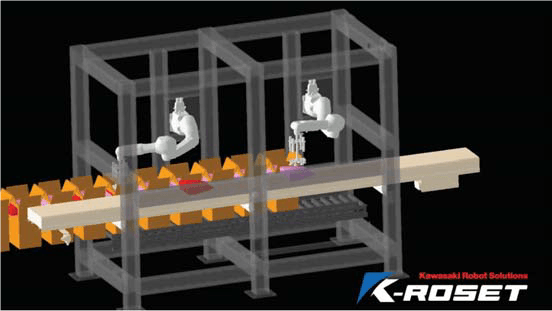
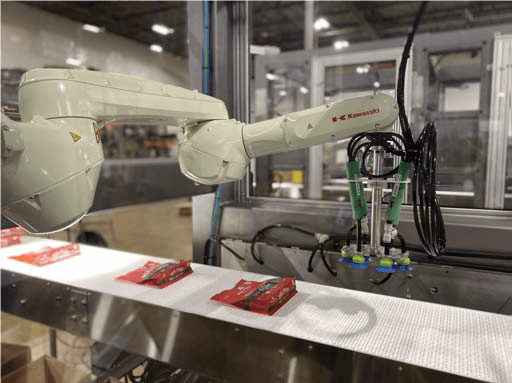
●벽걸이형 소형 범용 로봇 ‘RS007L’ 2대가 진공 그리퍼로 봉지 제품을 취급
●컨베이어 트래킹과 가와사키의 비전 소프트웨어 ‘K-VFinder’로 제품 추적
●다양한 상자 크기와 다품종 제품을 처리할 수 있는 특수 설계한 이동식 셀
고객의 요구에 따라 소형 범용 로봇인 ‘RS007L’ 2대가 진공 그리퍼를 사용하여 봉지 제품을 취급하는 셀을 구축했습니다. 컨베이어를 통해 흘러나오는 봉지를 가와사키중공업의 비전 시스템 ‘K-VFinder’가 인식하여 카메라로 촬영합니다. 비전 시스템의 데이터를 컨베이어 추적 데이터와 함께 로봇에 전송하여 봉지를 피킹할 위치를 결정합니다. 로봇은 정해진 위치에서 봉지를 피킹하고, 컨베이어에 준비된 골판지에 포장합니다.
시스템의 유연성
새로운 제품을 추가할 때 작업자는 봉지의 크기와 무게, 박스 크기를 HMI(휴먼 머신 인터페이스)에 입력하고 제품 번호를 할당하기만 하면 됩니다. MWES는 셀 내 컨베이어 레일의 폭을 조정할 수 있는 핸드 크랭크를 설치했습니다. 이를 통해 다양한 크기의 박스에 대응할 수 있어 고객이 원하는 유연성을 확보할 수 있게 됩니다. 다른 크기의 제품 포장으로 전환할 때 작업자는 HMI에서 제품 번호를 업데이트하고 포장하려는 제품 폭에 맞게 핸드 크랭크를 돌리면 됩니다.
셀은 유연성 외에도 크기가 작아 지게차로 공장 내 다른 장소로 이동할 수 있습니다. MWES의 영업 엔지니어인 Steve Phelps에 따르면, 전원, 공기, 이더넷을 연결하기만 하면 단 하루 만에 셀을 재가동할 수 있으며, 이는 성장하는 제조업체에게 매우 중요하다고 합니다. “이제 막 자동화에 익숙해진 성장 단계의 제조업체는 시설 내에서 장비를 주기적으로 이동해야 하기 때문에 이러한 패키징(박스 포장)을 제안했다”고 말했습니다.
이상적인 로봇
MWES가 이 셀에 소형 범용 로봇 RS007L을 선택한 이유는 뛰어난 이동 범위, 운반 중량, 고속 성능을 갖고 있기 때문입니다. 7kg의 운반 중량, 930mm의 리치, 유연한 옵션 및 중공 암 구조가 이 소형 셀에 적합하기 때문입니다. 암 내부에 비전 케이블, 센서 하네스, 공압 파이프 등을 수납할 수 있어 주변기기와의 간섭을 방지하고 좁은 설치 공간에서 작업이 가능합니다.
박스 포장 작업 자동화의 결과
● 제품 낙하 없이 분당 80봉지 포장 가능
● 작업자 최대 3명 감축, 공장 내 다른 작업으로 재배치
● 콤팩트하고 다재다능하며 유연성이 높은 시스템 구현
소형 범용 로봇 RS007L은 분당 80개의 봉지를 떨어뜨리지 않고 포장할 수 있으며, SIer의 MWES에 따르면, 이는 고객이 설정한 처리 능력과 가동률 목표를 초과하는 것으로, 이 시스템의 도입으로 2~3명의 직원을 각자의 기술에 적합한 더 높은 수준의 작업으로 재배치할 수 있게 되었다고 합니다.

Sharma, Anisha, “제조업계, 전례 없는 일자리 부족에 직면하다”, 딜로이트 미국법인, 2019년 4월 7일 보도 자료
-도입 로봇
모델명:
RS007L =RS 시리즈 중 차세대 로봇
특징
상부 암에 캔틸레버 구조를 채택하여 긴 리치와 본체 하부, 후방, 근접부까지 넓은 동작 범위를 실현
가반중량 : 7kg
축수 : 6축
반복 정밀도 : ±0.03㎜.
프로그래밍 툴: K-ROSET
적용 동영상
관련 제품

RS007L
더욱 빠르게, 넓게, 정확하게, 컴팩트하게
기술과 경험으로 진화된 충실한 로봇 R시리즈