Die von Kawasaki eigens entwickelte Roboter-Programmiersprache „AS“ ist eine vielseitige Robotersprache, mit der sowohl Bildschirmbefehle als auch Programmbefehle und Funktionen verwendet werden können. Diese Programmiersprache, mit der sich die Steuerung komplexer Betriebsvorgänge und Sequenzen problemlos programmieren lässt, kann standardmäßig bei allen Kawasaki Robotern eingesetzt werden.
neoROSET
Automatische Roboterprogrammiersoftware neoROSET
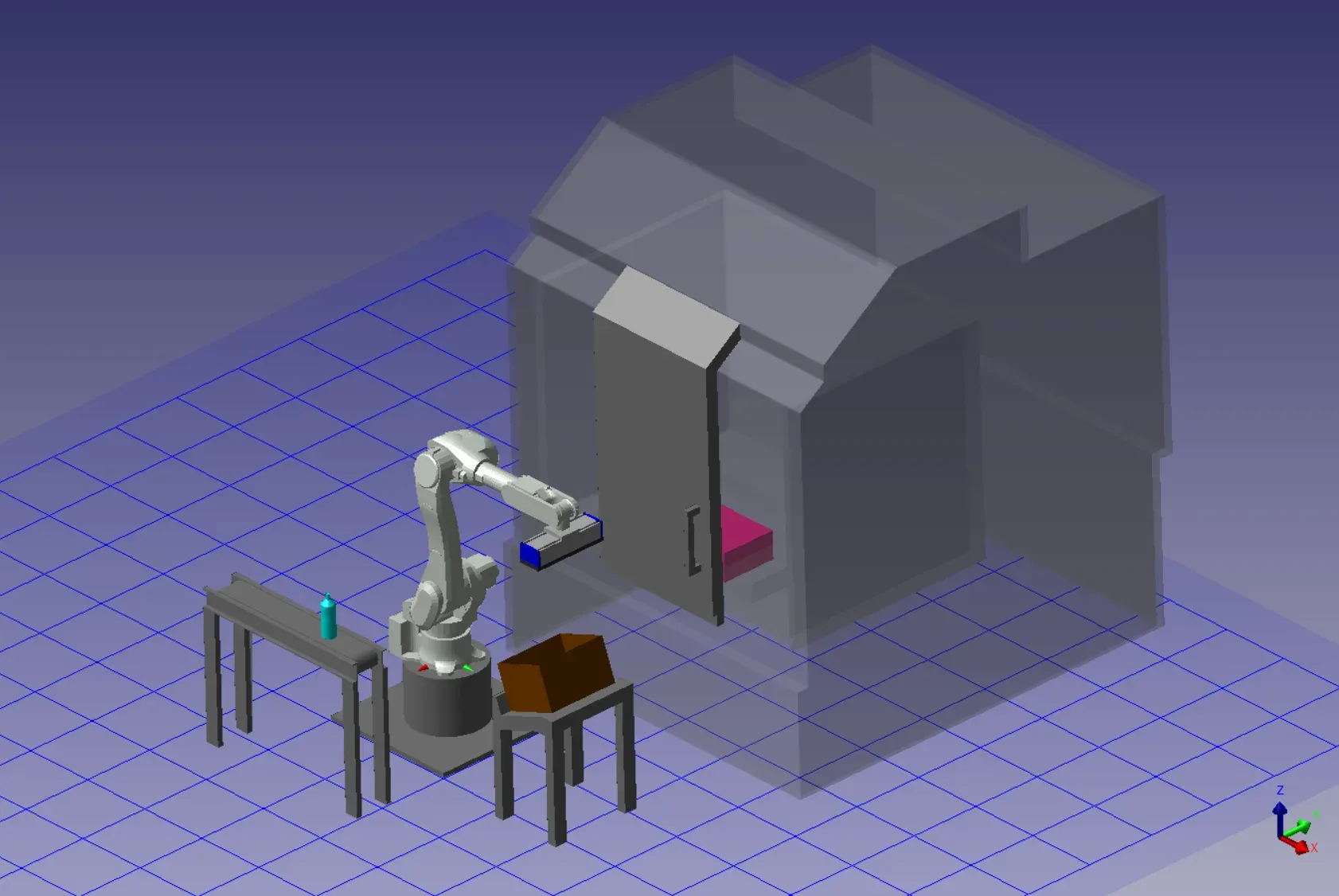
K-ROSET
Tool „K-ROSET“ für Offline-Programmierung von Robotern.
K-SPARC
K-SPARC ist Kawasakis Palettiersoftware, die auf der Plattform von K-ROSET aufbaut.