
가와사키 로봇은 50년 이상의 경험과 실적을 바탕으로 자동화 실현을 도와드리겠습니다.
적용용도 일람
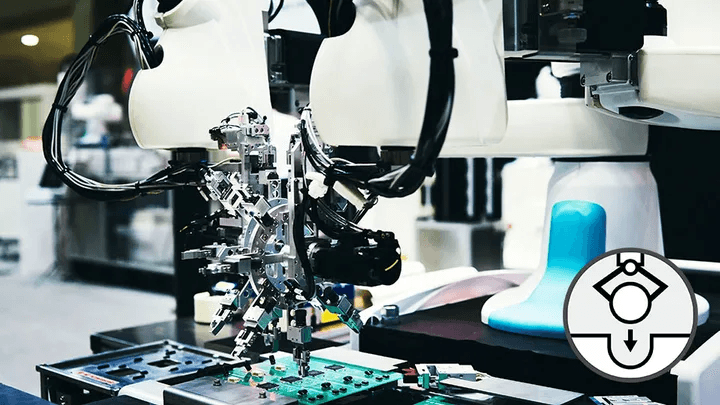
조립
“조립”은 여러 개의 부품을 조립해서 컴포넌트나 제품을 만드는 작업으로 기계 산업이나 전자·전기 산업을 비롯해 모든 제조업 공정에서 이루어지고 있는 작업입니다.
소형 정밀 부품이나 대형 중량 부품의 조립 등 다양한 작업이 있습니다.

핸들링
“핸들링”은 재료, 부품, 제품 등을 어떤 장소에서 다른 장소로 이동시키는 작업으로 제조업만이 아닌 거의 모든 산업에서 사용되고 있는 작업입니다.
소물 부품의 고속 반송과 사람이 운반할 수 없는 중량물 핸들링 등 많은 분야에서 산업용 로봇이 가장 많이 사용되고 있는 작업입니다.

로딩・언로딩
“로딩·언로딩”은 NC 공작 기계 등에 부품을 공급하고, 가공 종료 후에 끄집어 내는 작업으로 기계 산업에서는 반드시 필요한 공정입니다. 또한, 단조 기계에 가공 재료를 넣고 꺼내는 것도 로딩·언로딩에 포함됩니다.

팔렛타이징
“팔렛타이징”은 상자, 봉투, 병 등의 제품을 팔레트에 쌓는 작업으로 제조업에서의 출하와 물류업계에서 많이 이루어지는 작업입니다. 한편, “디팔렛타이징” 은 그 반대로 제품을 팔레트에서 순서대로 끄집어 내리는 작업입니다.
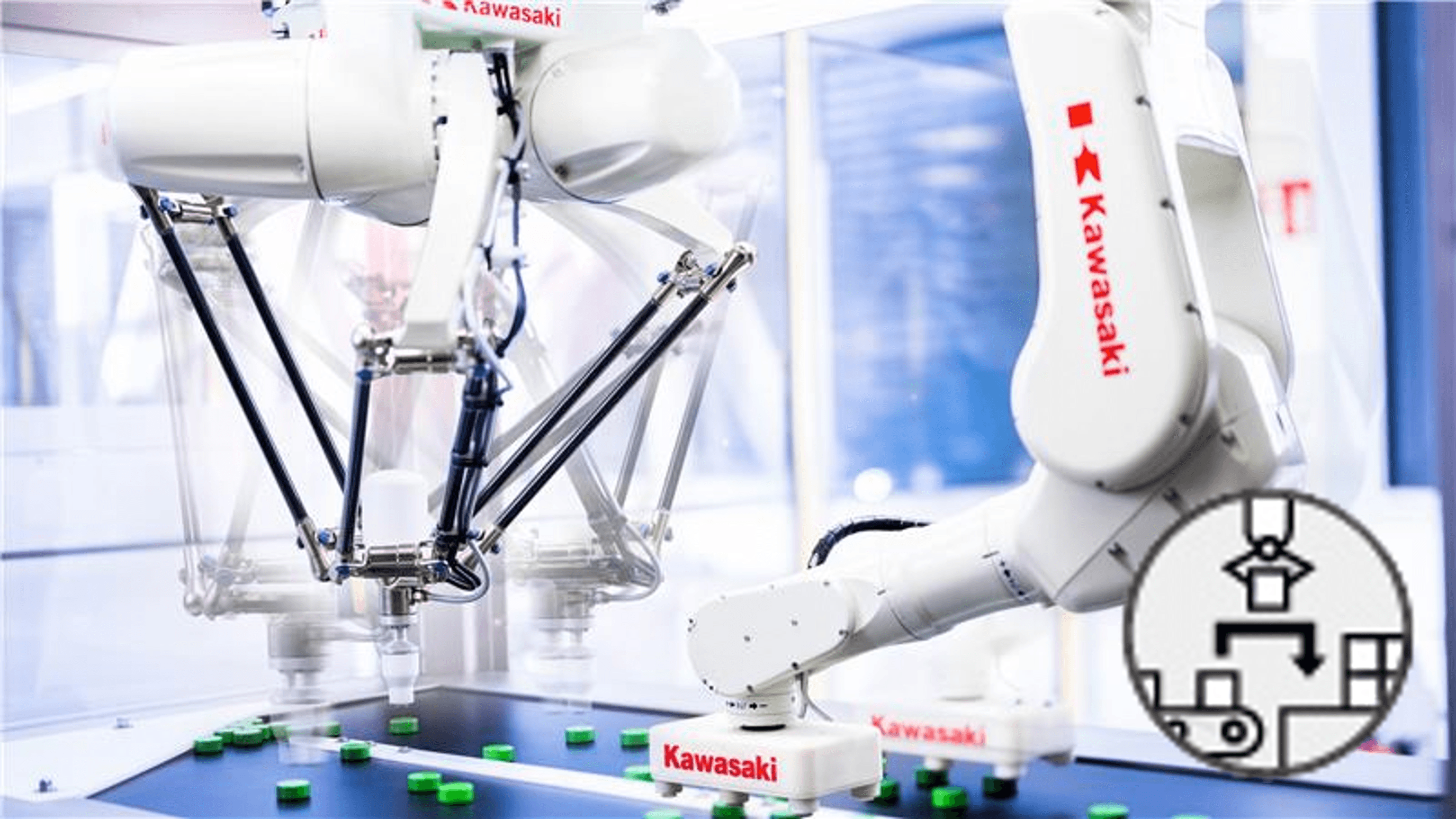
피킹
“피킹”은 픽 앤 플레이스라고도 불리며, 벨트 컨베이어 위에서 움직이는 것을 고속으로 집어내 분류하는 작업입니다.
로봇은 평행 링크 구조(또는 델타 로봇 구조)라 불리는 독특한 형태의 로봇이 사용됩니다.
도장
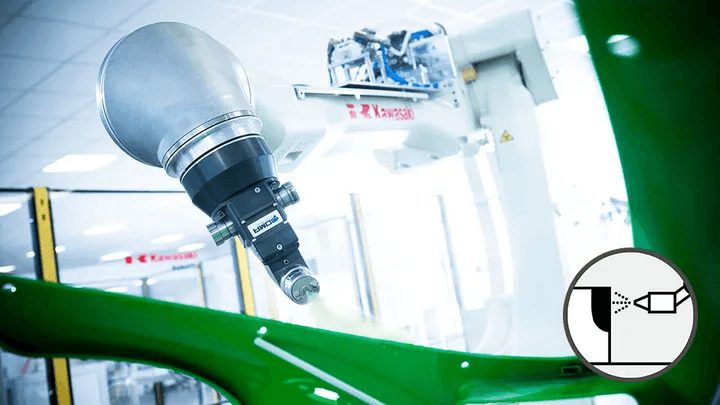
“도장 작업”은 제품 표면에 도료를 도포하여 도막을 형성시켜 마감하는 작업입니다.
도료 재료는 대부분의 경우, 휘발성이 높기 때문에 방폭형 로봇이나 도장 기기가 사용됩니다.

실링/도포
“실링”은 실링 재료와 접착제 등을 도포하여 재료 간의 기밀성을 높이거나 틈새를 매우는 작업입니다.
승용차나 가전제품 등 많은 제품에 실링 작업이 이루어지고 있습니다.

연마
“연마·디버링”은 주물 제품이나 단조 제품의 표면 혹은 용접 후 표면의 돌출된 부분을 제거하는 작업입니다.
그라인더 등으로 가장자리에 돌출된 불필요한 부분을 제거하는 대표적인 3D 작업이며, 로봇의 활약이 적용될 수 있는 파트입니다.

아크 용접
“아크 용접”은 아크 방전을 이용해 금속 재료를 용접하는 용접 방법으로 기계·금속 산업, 자동차 산업에 많이 사용되고 있는 작업입니다. 로봇과 아크 용접기를 사용해 재료를 용융하면서 접합합니다.
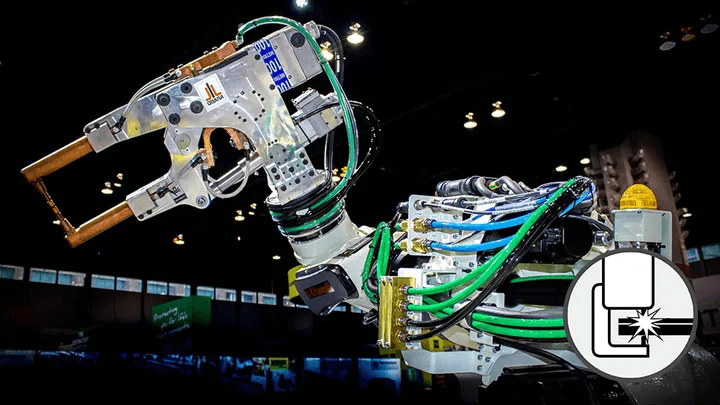
스폿 용접
“스폿 용접”이란 2장의 모재에 전극봉으로 전류를 흘려보내 그 저항열로 모재를 용해하고 용접하는 작업으로 전기 저항 용접이라고도 불립니다. 자동차 차체 강판의 용접에는 매우 많은 스폿 용접이 사용되기 때문에 자동차 산업에서는 대량의 로봇이 사용됩니다.
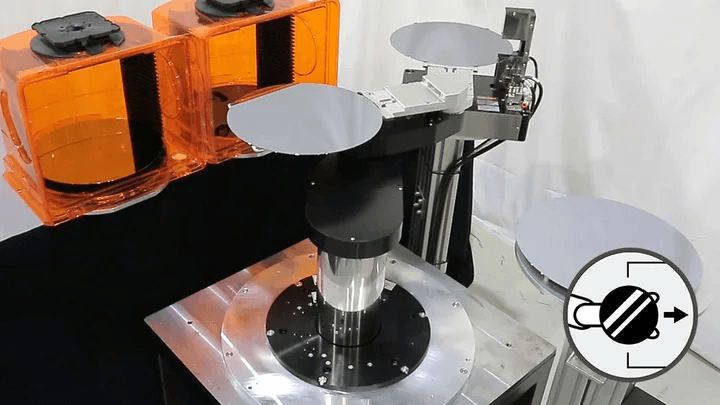
웨이퍼 반송
“웨이퍼 반송”이란 반도체 제조 장치의 앞 공정으로 웨이퍼를 핸들링하는 작업입니다. 클린 로봇이 사용되며, 고정밀도와 빠른 속도, 매끄러운 동작이 요구됩니다.