로봇 사양
- 대응 로봇아래 로봇으로 대응합니다.
※핸드 및 워크 중량에 따라 로봇을 선정해 주세요.
RS-003N、RS-005N/L、RS-007N/L、RS-013N、duAro1、duAro2 - Application Softwareー
- 로봇 옵션R시리즈:솔레노이드 밸브,、센서 하네스, duAro시리즈:표준 사양에 대응


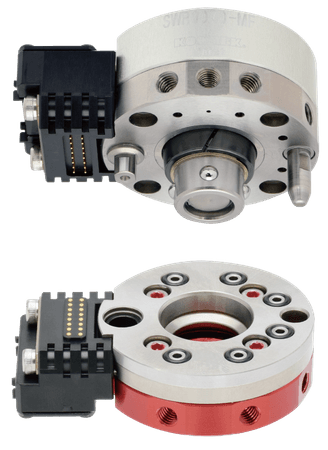
【로봇 핸드 체인저】ModelSWR
위치 재현 정밀도 0.003mm의 고정밀 고강성 툴 체인저 (가반 중량: 0.5~360kg 가반)
연결 시 유극 없이 고정밀(위치 재현 정밀도: 3μm), 고강성(굽힘, 비틀림에 강함), 고수명(200만 회 이상의 내구성)
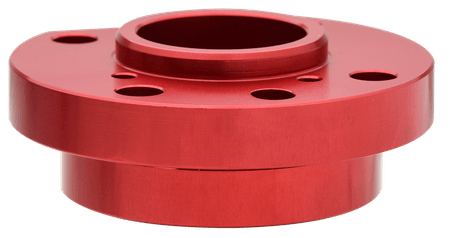
【변환 플레이트】ModelSWRZ
대응 로봇: 대응 변환 플레이트 (대응 로봇 핸드 체인저)
RS-003N:SWRZ0030-MF2 (SWR0030)
RS-005N/L:SWRZ0070-MF2 (SWR0070)
RS-007N/L:SWRZ0070-MF2 (SWR0070) ※별도, M5×10 볼트 4개 필요
duAro1/duAro2:SWRZ0030-MF2 (SWR0030)

제품 본체에 관한 매뉴얼, 기술 자료 등은 상기 제품 페이지에서 확인해 주세요.
배선/배관 관련 R 시리즈에 대해서는 『설치·접속 요령서』, 『옵션 하네스 설명서』를, duAro에 대해서는 『duAro 취급설명서』를 참조하십시오.