
2Dビジョンとは?
2Dビジョンは、平面上の部品や製品を正確に認識し、位置や向きを補正するために使います。例えば、コンベア上を流れる製品の位置を特定したり、QRコードやバーコードを読み取ったり、ラベルの印字や欠陥を検査することができます。高さ情報は扱いませんが、整列されたワークのピッキングや位置合わせに最適です。
| 物体認識 | パターンマッチング |
| 位置補正 | XY座標・回転角 |
| ピッキング | 平面上のワーク |
| ロボット連携 | シンプルな動作 |
2Dビジョンでできること ~物体認識/位置補正・ガイド機能~
- XY座標と回転角の補正が可能(高さ情報はなし)
- ワークのズレ補正(2D座標上の位置決め)
- 平面上のアライメント(位置合わせ)
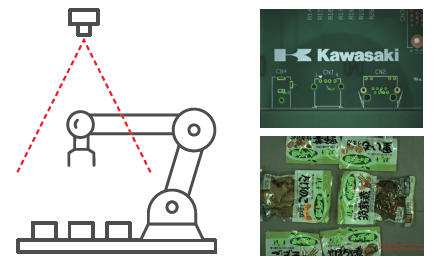
- 画像の色や輪郭を基に物体を識別
- QRコードやバーコードの読み取り
- ラベル検査(印字確認・欠陥検出)
- 平面上の部品やワークの位置特定
ピッキング/デパレタイズでの活用
- 平面上に整列されたワークのピッキング
- コンベア上を流れる部品の位置特定
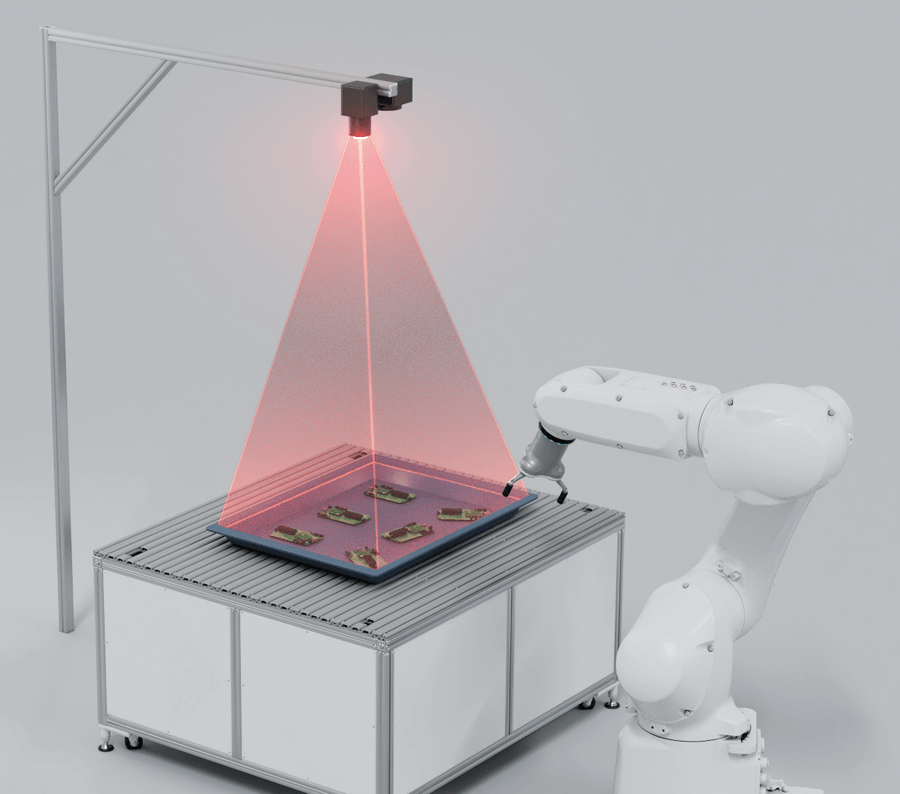
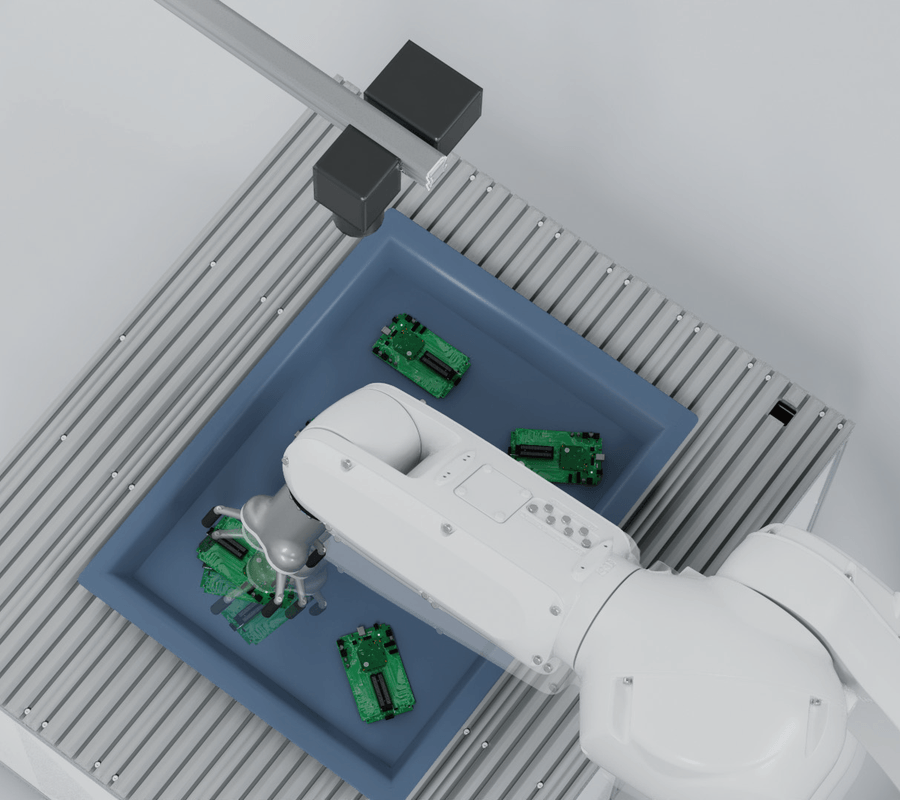
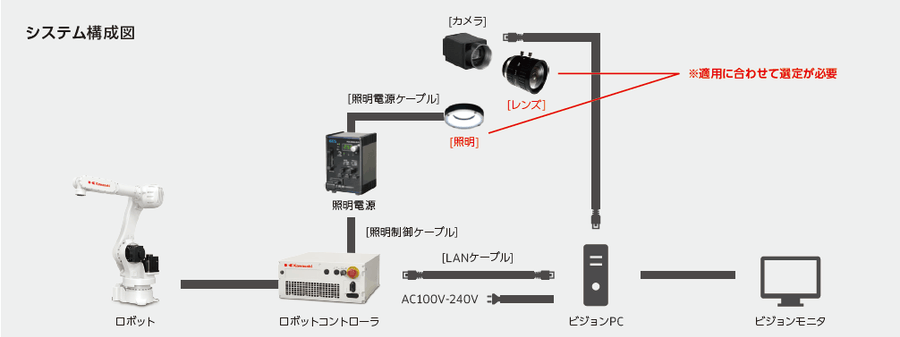
川崎重工の2次元ビジョンシステムの構成
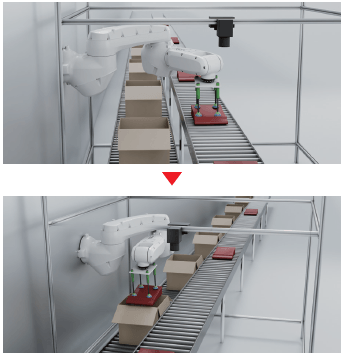
導入事例 2次元ビジョンシステムによる箱詰めシステム
ビジョン認識による箱詰めシステム
米国ミシガン州のカワサキ認定SIerであるMWES社は、食品・飲料業界における労働力不足と多品種・異なる箱サイズへの対応という課題を解決するため、川崎重工の小型汎用ロボットRS007Lにビジョンソフト「K-VFinder」を組み合わせ、コンベアトラッキングと真空グリッパーを活用した柔軟な箱詰め自動化セルを構築しました。このシステムは、ビジョン認識によって流れる袋製品を正確に追跡し、最適なピック位置をリアルタイムで決定することで、毎分80袋の高速処理と異なる箱サイズへの即時対応を実現し、最大3名の省人化と高い生産性を達成しました。
