外観検査ロボットシステム
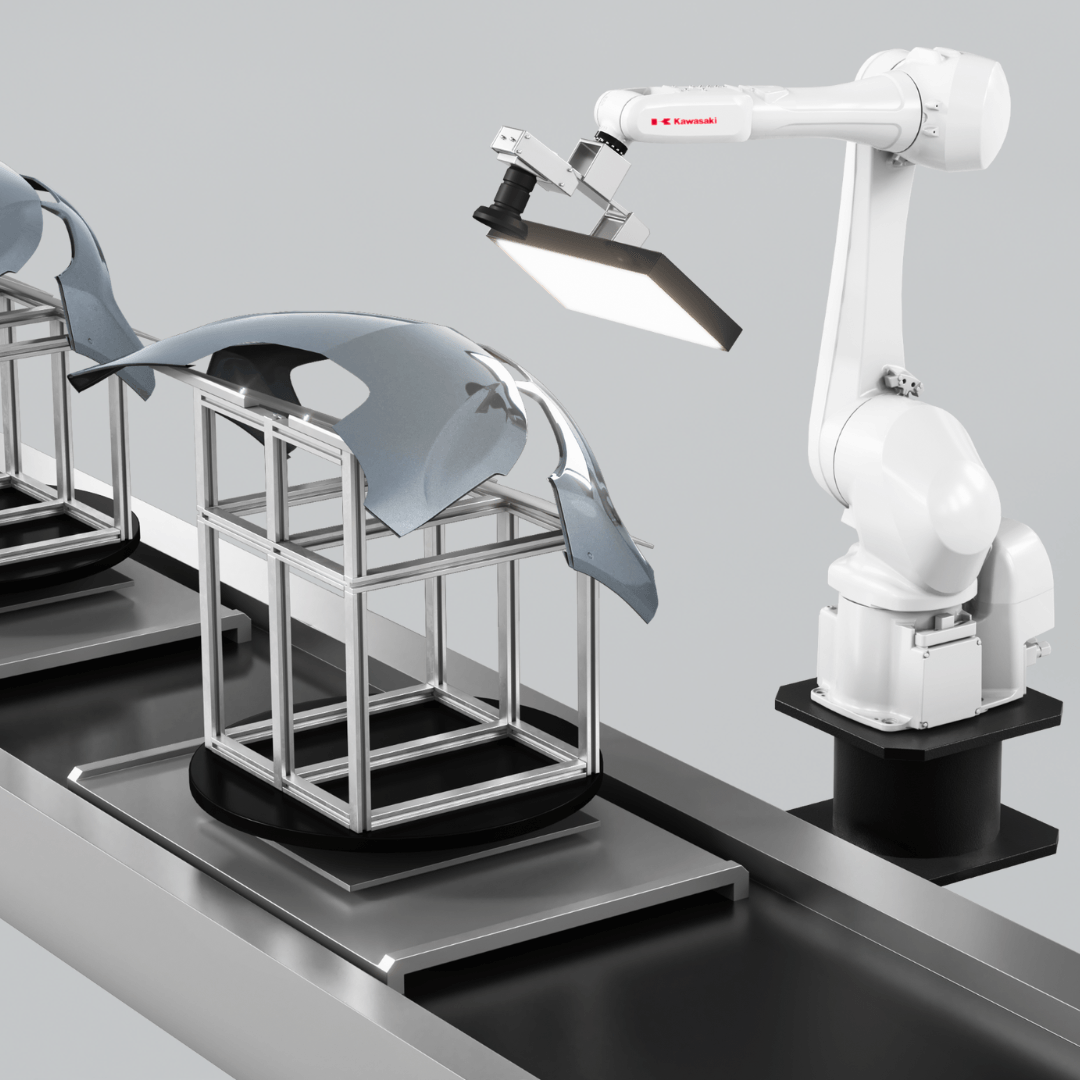
川崎重工の外観検査ロボットシステムは「ツール先端移動量出力機能」を駆使することで、曲面に沿った動きをさせることができ、高解像度で撮像できるラインスキャンカメラの性能を最大化することができます。 複雑形状に対して高速で高精度な検査の自動化を可能にしました。
川崎重工の外観検査ロボットシステムは「ツール先端移動量出力機能」を駆使することで、曲面に沿った動きをさせることができ、高解像度で撮像できるラインスキャンカメラの性能を最大化することができます。 複雑形状に対して高速で高精度な検査の自動化を可能にしました。