
ピッキング
カワサキロボットでピッキング作業を効率化
ピッキングロボットとは?
ピッキングロボットは、食品、医薬品、化粧品、電気・電子部品、機械部品など、幅広い業界で使用されているロボットです。コンベア上を高速で移動する小型のワークを素早く把持し、仕分けすることができます。
「ピッキング」とは、コンベアベルト上を流れる小さな部品や食品をつかみ、決められた場所に仕分けする作業のことです。この作業を正確かつ効率的に行うためには、ロボットの高速動作が求められます。ピッキングロボットは単体での運用だけでなく、複数台を連携させたシステム構築にも対応しており、さまざまな用途に活用されています。
近年、納期短縮や在庫管理の効率化が求められる中、世界中の工場や倉庫では、より高機能・高信頼性・高耐久性のピッキングロボットへの需要が急速に高まっています。従来は手作業で行われていたピッキング作業を自動化することで、生産性の大幅な向上が実現されています。

ピッキング適用の課題
コンベア上を高速で移動する小さな食品や部品のピッキングには、いくつかの課題があります。特に、以下のようなケースではロボットの追従が難しくなることがあります。
- ワークがランダムに配置されている場合
- 表面が光沢や反射を持っている場合
ピッキングロボットは、これらの条件下でも正確にワークを把持し、迅速に積載する必要があります。動作の再現性が高くなければ、サイクルタイムが長くなり、生産コストの増加やお客様の不満につながる恐れがあります。
また、一部のお客様からは「ピッキングロボットの操作は難しい」という声もありますが、カワサキのロボットなら簡単な操作でピッキング動作をさせることが可能です。

川崎重工が選ばれる理由
川崎重工のピッキングロボットが優れている理由は、「高速動作」と「高精度な画像認識技術」にあります。
- 高速動作:ロボットはわずか0.2秒でカメラ画像を認識・処理し、対象ワークを素早くかつ正確に把持します。これにより、コンベア上の高速ピッキング作業にも十分対応できます。
- 高精度な画像認識と把持精度:ワークの位置や姿勢を正確に認識し、安定した把持動作を繰り返し行うことで、高い再現性と品質を実現します。
さらに、カワサキのロボットは特定のビジョン技術に依存せず、用途に応じた最適なビジョンシステムと柔軟に連携可能です。たとえば、シンプルな2Dカメラによる認識が適している現場でも、AI搭載の高性能3Dビジョンシステムが必要な現場でも、対応が可能です。
これにより、単一ロボットでの運用はもちろん、複数のロボットを組み合わせた高度なピッキングシステム構築にも柔軟に対応できます。


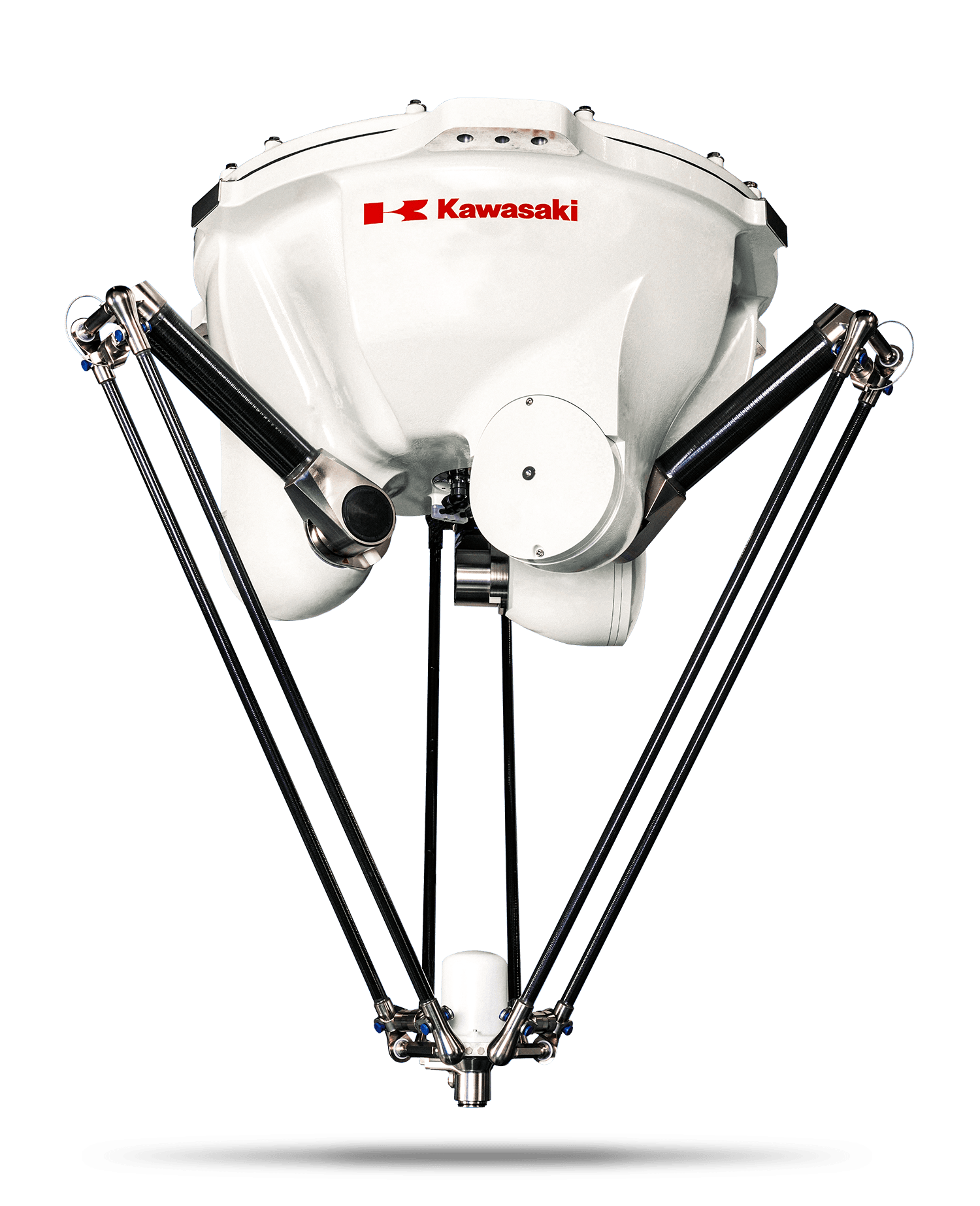
川崎重工のピッキングロボット
オープンアーキテクチャと高度技術により、カワサキロボットは、高速で移動するワークのピッキングを正確に行います。
高速性能、妥協のない作業効率、最先端のビジョンにより、あらゆるピッキング用途に最適です。

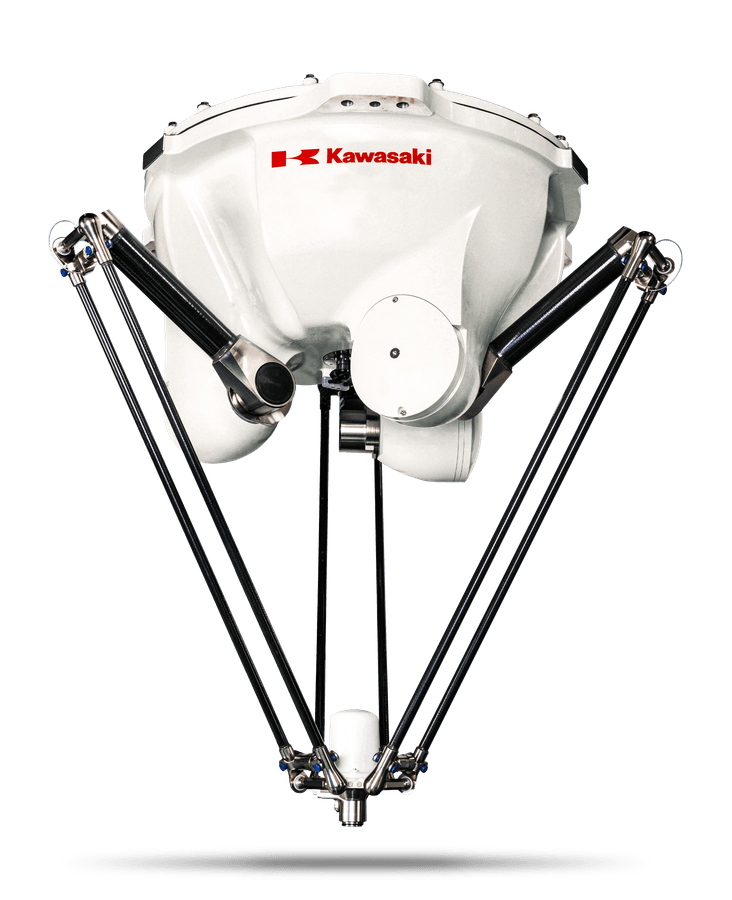
Yシリーズ
ピッキングロボット
- 食品、医薬品、化粧品、電気製品など、幅広い用途に対応する長いリーチと高速性能。
- 可搬質量2kgと3kgの機種で、リーチがそれぞれ300mmと650mm。
- 可搬質量2kgの機種はコンパクトで、3kgの機種は可動範囲が大きい。
- 両機種ともに食品用グリースを使用。3kgの機種は衛生環境下での洗浄が可能。
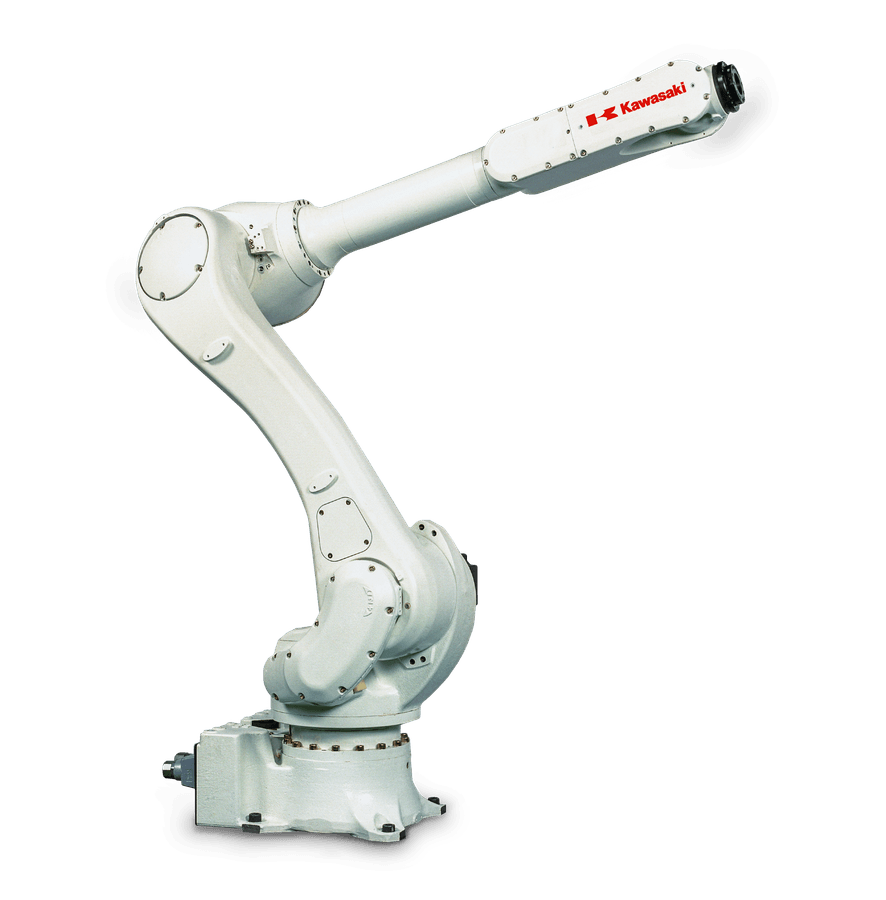
Rシリーズ
小中型汎用ロボット
- 幅広い作業に対応可能なラインアップ
- トップクラスの動作速度
- コンパクトかつ広範な動作範囲

お客様の課題解決
川崎重工へ自動化の相談することで、以下のようなメリットがあります:
■生産性向上
数多くの導入実績がある高性能ロボットによる生産性の改善。
■柔軟に拡張できるソフトウェア
・特定の技術に縛られず、業界でも珍しいオープンなシステム設計。
・SIerパートナーとの連携により、機器(2D/3Dビジョン、周辺機器)との連携が可能。
■柔軟な対応
・単純な作業からAIを活用した複雑な工程まで幅広く対応。
・お客様のニーズに応じたカスタマイズが可能。
■相談しやすい企業文化
川崎重工のスタッフは、柔軟かつ協力的な姿勢でプロジェクトに取り組んでおり、オープンなコミュニケーションを大切にしています。
川崎重工と共に構築するシステムは、単なる自動化ではなく、お客様の生産ラインに最適な価値を提供するためのパートナーシップを目指しています。
ピッキングロボットFAQ
よくある質問にお答えします
ロボットは1時間あたり何個の製品を処理できますか?
当社の製品を処理する場合、 ロボットはどのようなツールを使用できますか?
当社の用途に適したロボットをどのように選択すればよいですか?
ロボットが標準外の環境に設置されている場合はどうなりますか?
製品をロボットにどのように供給すべきですか?
ロボットは走行中のコンベア上にある製品を認識できますか?
2Dおよび3Dビジョンとは何ですか?
ロボットのティーチングはどのようにするのですか?
作業工程のシミュレーションを作成することはできますか?
川崎重工に相談する
ピッキングの自動化で課題がある時は川崎重工にご相談ください。一緒に解決策を模索していきます。