
ピッキング
ピッキングロボット作業でピッキング作業を効率化
ピッキングロボットとは?
ピッキングロボットは、コンベア上を高速で移動する小型のワークを素早く把持し、仕分けすることができるロボットです。近年では食品、医薬品、化粧品、電気・電子部品、機械部品など、幅広い業界で使用されています。
「ピッキング」とは、コンベアベルト上を流れる小さな部品や食品をつかみ、決められた場所に仕分けする作業のことです。この作業を正確かつ効率的に行うためには、ロボットの高速動作が求められます。ピッキングロボットは単体での運用だけでなく、複数台を連携させたシステム構築にも対応しており、さまざまな用途に活用されています。
近年、納期短縮や在庫管理の効率化が求められる中、世界中の工場や倉庫では、より高機能・高信頼性・高耐久性のピッキングロボットへの需要が急速に高まっています。従来は手作業で行われていたピッキング作業を自動化することで、生産性の大幅な向上が実現されています。

ピッキング適用の課題
コンベア上のワークは高速移動し、ランダムな向き・位置で流れてくることが多く、これにロボットが追従するのは容易ではありません。光沢・反射の強いワークはカメラ認識が難しく、正確な把持を妨げます。
このような適用においてロボットには以下のような性能・機能が必要とされます。
- 高速追従性能
- 高精度な画像認識
- 把持ミスを減らす安定した動作再現性
また「操作が難しそう」という不安もありますが、川崎重工のピッキングロボットはシンプルな設定で動作可能なため、初めての現場でも扱いやすい設計となっています。

川崎重工のロボット
川崎重工のピッキングロボットは、高速動作・高可搬・省スペース設計により、物流現場の自動化を力強くサポートします。
高速動作機能
ロボットは、わずか0.2秒で画像認識〜把持動作を実行できる高速処理能力を備えています。これにより、コンベア上を流れる小型ワークにも素早く追従し、高速ラインでも安定したピック&プレース作業を実現します。
高精度な画像認識と安定した把持再現性
ワークの位置・姿勢を正確に把握できる高精度ビジョンにより、形状や向きのばらつきがあっても安定した把持を継続できます。高い再現性を持つ動作制御により、品質の均一化や不良率低減に効果を発揮します。
ビジョン・システム構成の自由度が高い柔軟性
川崎重工のロボットは、特定のビジョン方式に依存せず、2D・3D・AIビジョンなど、現場に最適なシステムと柔軟に組み合わせが可能です。単体ロボットから複数台を連携させた高度なピッキングシステムまで構築でき、さまざまな業界・用途に対応できます。
適用動画
導入事例

導入事例: ビジョン認識による箱詰めシステム(Midwest Engineered Systems Inc.)

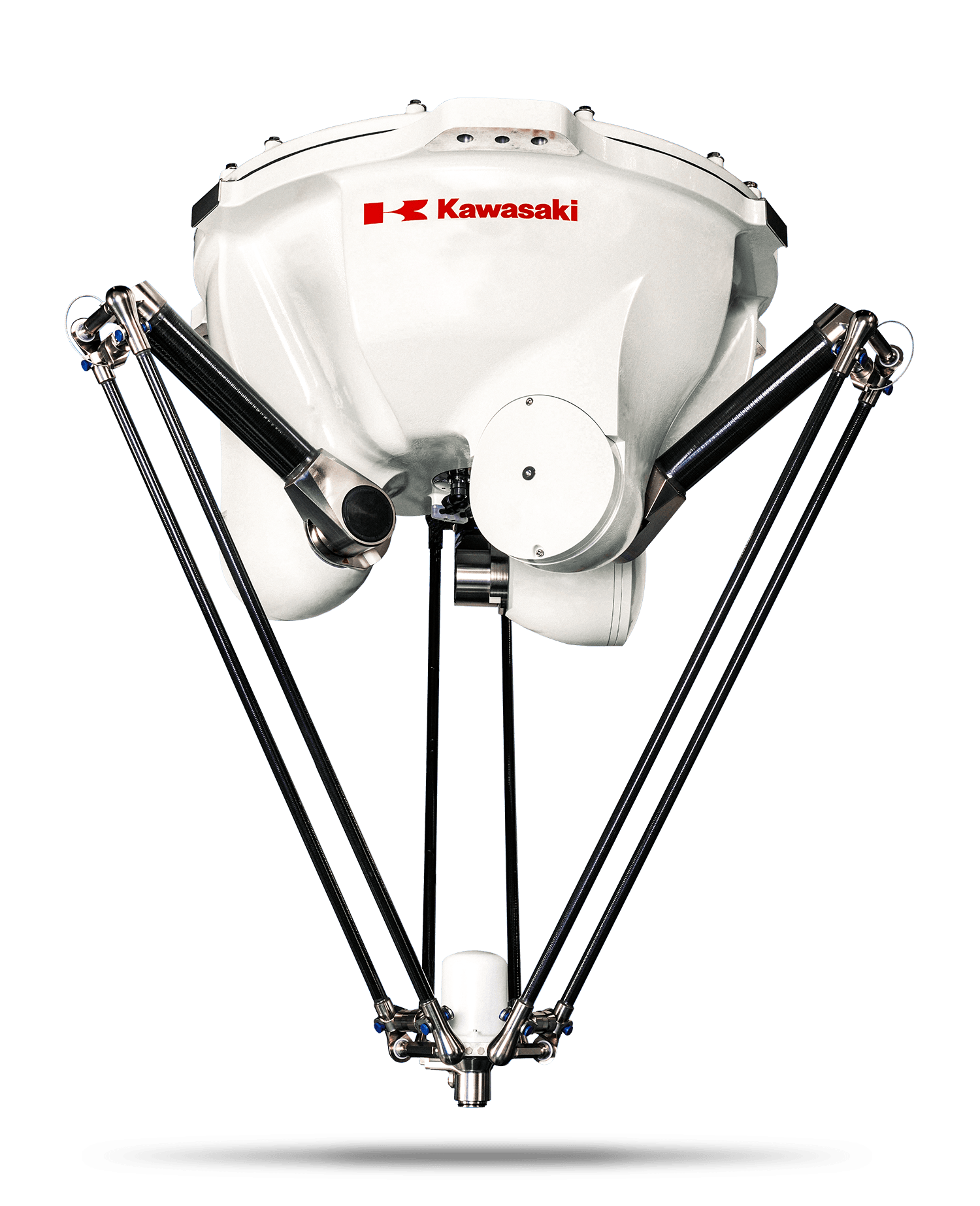
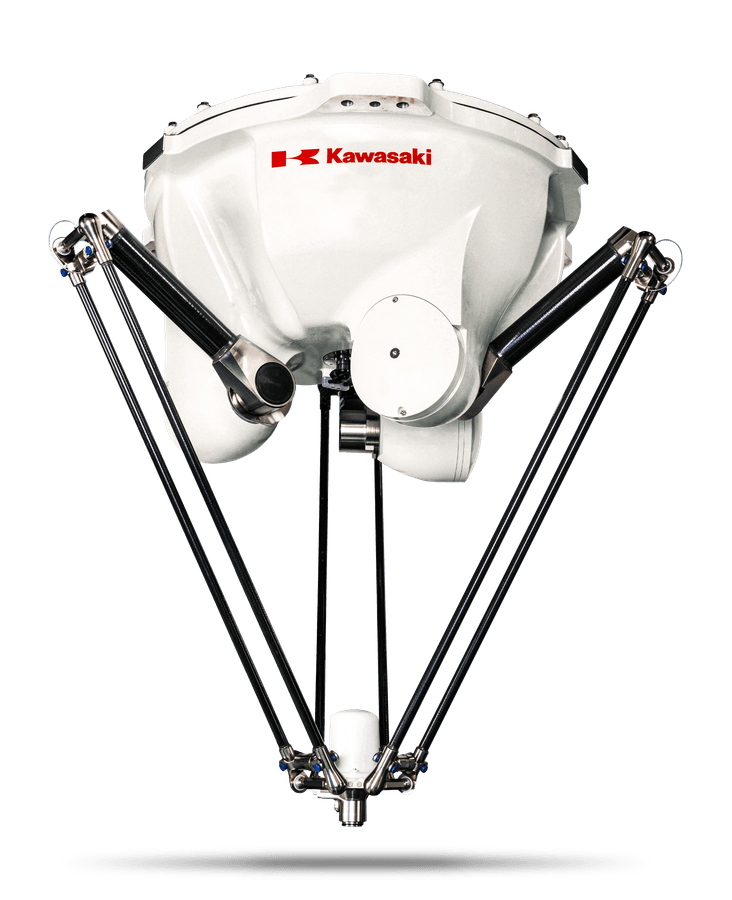
Yシリーズ
ピッキングロボット
- 食品、医薬品、化粧品、電気製品など、幅広い用途に対応する長いリーチと高速性能。
- 可搬質量2kgと3kgの機種で、リーチがそれぞれ300mmと650mm。
- 可搬質量2kgの機種はコンパクトで、3kgの機種は可動範囲が大きい。
- 両機種ともに食品用グリースを使用。3kgの機種は衛生環境下での洗浄が可能。
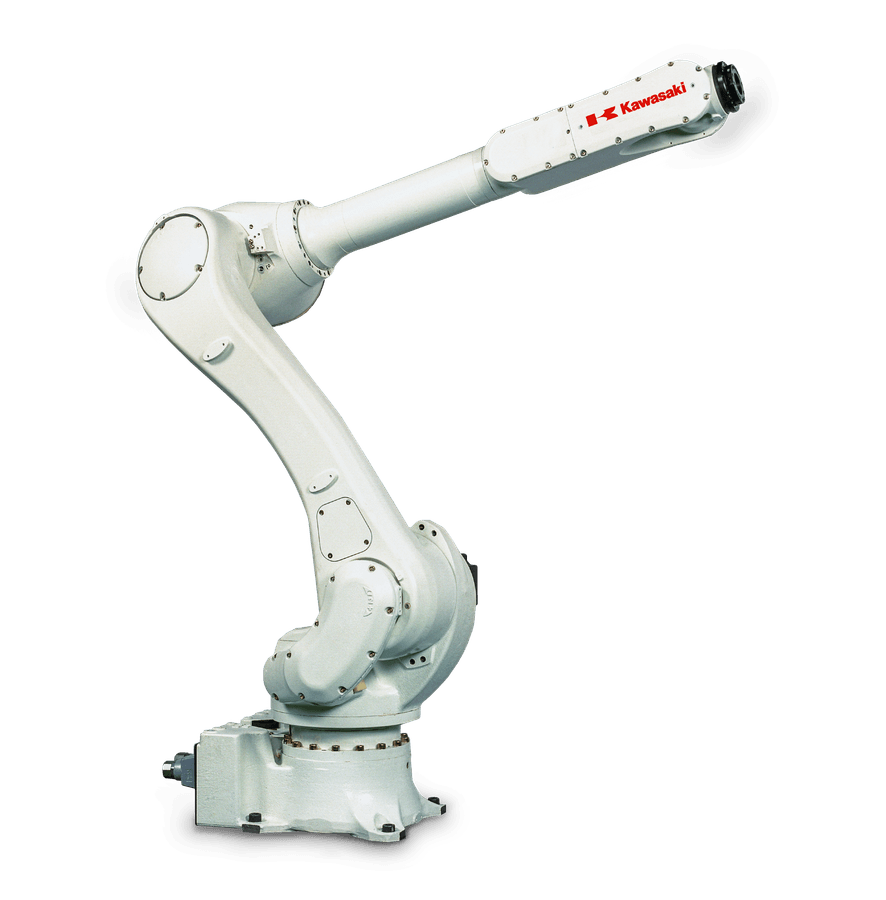
Rシリーズ
小中型汎用ロボット
- 幅広い作業に対応可能なラインアップ
- トップクラスの動作速度
- コンパクトかつ広範な動作範囲

サポート
川崎重工は単なるハードウェアの提供に留まりません。
- 高い生産性を誇るロボット
- オープンなアーキテクチャで柔軟なカスタマイズ
- 技術に縛られない設計思想
単なる保守ではなく、ロボットの一生「導入 → 稼働 → 整備 → 更新」までをフルカバーする総合サポート体制を整えています。さらに、全国サービス拠点・24時間ヘルプデスクなど、「いつでも頼れる体制」が整っており、導入後も安心して運用し続けられます。