ロボット仕様
- 対応ロボットRS0003N
RS005N
RS005L
RS007N
RS007L
RS013N
duAro1
duAro2 - 対応ASシステムソフトー
- ロボットオプションロボットアーム内蔵バルブ2個以上

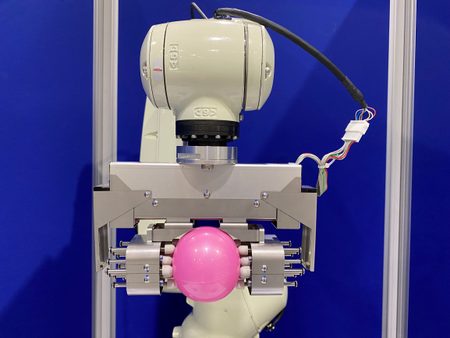
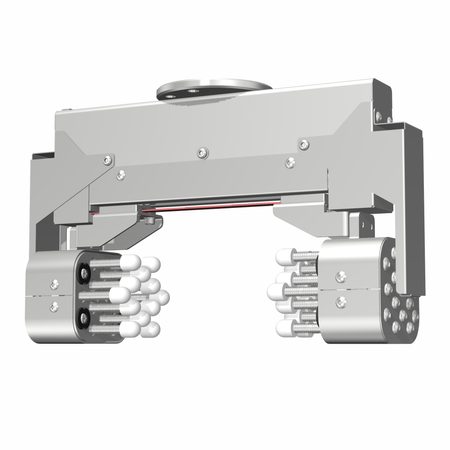
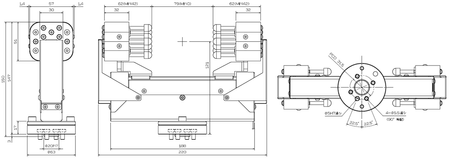
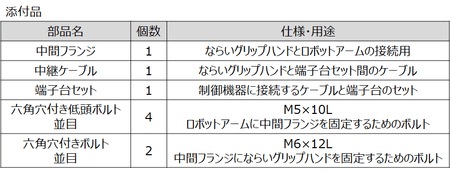
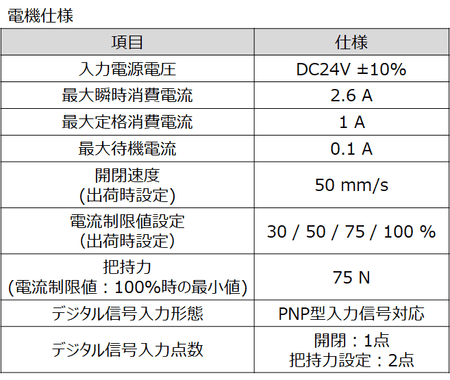
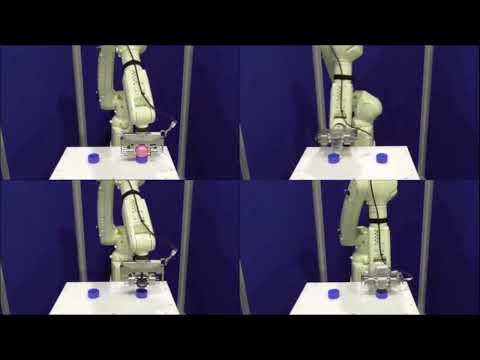
ワークの形状に合わせて変化するならい機構を持ち、複雑な形状のワークでも
安定して把持可能な小型軽量の汎用ロボットハンドです。
プログラム可能なコントローラを内蔵し、
デジタル信号のみで開閉と把持力の制御が可能なロボットハンドです。
小型ロボットアームに取り付けるための中間フランジ、制御機器に接続するための中継ケーブル、端子台セットをオプションとして追加した仕様となります。