▼正確な動作軌跡、タクトタイム▼
カワサキが長年培ってきた仮想ロボットコントローラ技術により、 非常に正確な動作軌跡、タクトタイムを再現できます。
▼複数ロボット、外部軸に対応▼
異なるコントローラ、適用のロボットを複数台同時にシミュレーションできます。 また、ロボットコントローラで制御する外部軸を自由に再現することができます。
▼干渉チェック、レイアウト検証▼
実機への導入前に、PC上で干渉や動作範囲の問題が ないか事前に検証することができます。
▼CADファイルインポート▼
多くの種類のCADファイルのインポートに 標準で対応しており、レイアウト構築や CAD上の教示に役立てることができます。
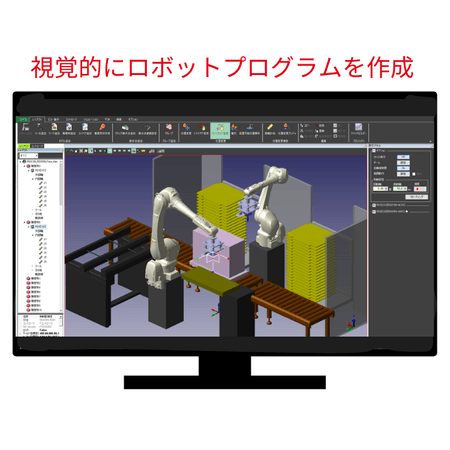
▼AS 言語エディタ▼
グラフィック画面と連携してカワサキのロボット言語 プログラムを簡単に作成できるエディタです。
▼3DPDF 作成▼
シミュレーション中の動作をファイル出力し、一般的なPDFリーダで3D再生できるためプレゼンや 情報共有に役立ちます。
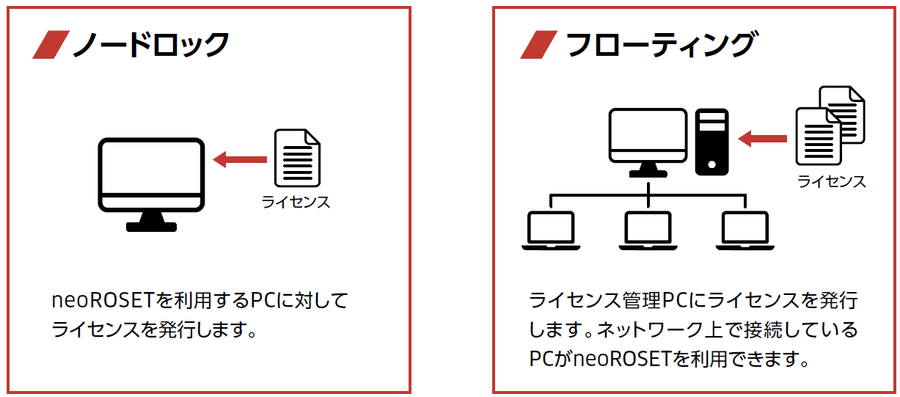
サブスクリプション
ソフトライセンスとしてノードロックとフローティングライセンスが あります。
動作環境
| 項目 | 内容 |
|---|---|
| オペレーティングシステム (OS) | WindowsⓇ11Prox64/WIndowsⓇ11 Enterprisex64 日本語版/英語版/中国語版/ドイツ語版 |
| CPU | Intel Core i5以上を推奨 |
| メモリ | 最低8GB RAM、16GB以上を推奨 |
| 空き容量 | 30GB 以上 ソリッドステートドライブ(SSD)推奨 |
| 解像度 | 1920×1080以上を推奨 |
| グラフィックカード | Intel UHD Graphics以上 又は、NVIDIA Quadroシリーズを推奨 |
| その他要件 | マウス(ホイール付きを推奨)、又は同等のポインティングデバイス Adobe🄬 Acrobat🄬 Reader等のPDF Reader |
外観検査に特化したオプション機能 VI Planner
従来は、複雑な曲面に対して、ロボットのツールを面直に教示するのは難しく、ラインカメラでは照明の映り込み範囲の確認も困難でした。川崎重工が提供する「neoROSET VI Planner」は、対象形状に合わせた面直教示や、最適な検査パスの自動生成を支援。誰でも簡単に効率的で高精度な外観検査ロボットの教示が可能になります。
※上記のneoROSETの標準ライセンスに加え追加のオプションライセンスが必要になります。
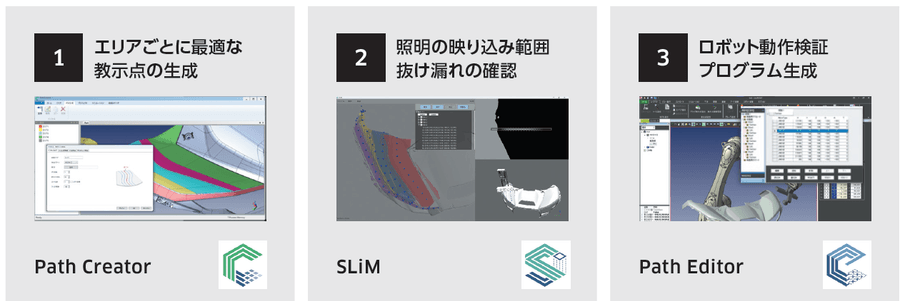
Path Creator
Path Creatorは、検査対象をエリアごとに分割し、各エリアに対して最適な検査パスを自動で生成する機能です。複雑な形状や広範囲の検査対象でも、CADデータをもとに効率的なパスを構築できるため、教示作業の手間を大幅に削減できます。
SLiM
SLiMは、Path Creatorで作成した検査パスでの照明の映り込み範囲や、抜け漏れを視覚的に確認できる機能です。
Path Creatorで作成する検査パスの照明の映り込みを検証できるので、現場での試行錯誤を削減し、立上げ時間を短縮します。
Path Editor
Path Editorは、Path Creatorで作成しSLiMで検証した検査パスの編集や、プログラムを自動生成する機能です。
検証した動作から、実機で使用可能なロボットプログラムを自動生成できます。
パレタイジングに特化したオプション機能
従来は、積み付けパターンの定義や品種変更への対応は複雑で、レイアウト設計やロボットプログラムの作成に多くの時間と労力がかかっていました。
また、衝突や配置ミスによるトラブルも発生しやすく、現場での教育や操作も難しいという声が多く聞かれました。
この川崎重工が提供する「neoROSET パレタイズ機能」は、誰でも簡単にパレタイジング設定ができるソフトウェアです。
お客様のパレタイズロボットの導入促進に貢献します。
※neoROSETの標準ライセンスに加え追加のオプションライセンスが必要になります。
6 ステップで、効率的かつ正確な設定が可能
1.ロボットとハンドを選択
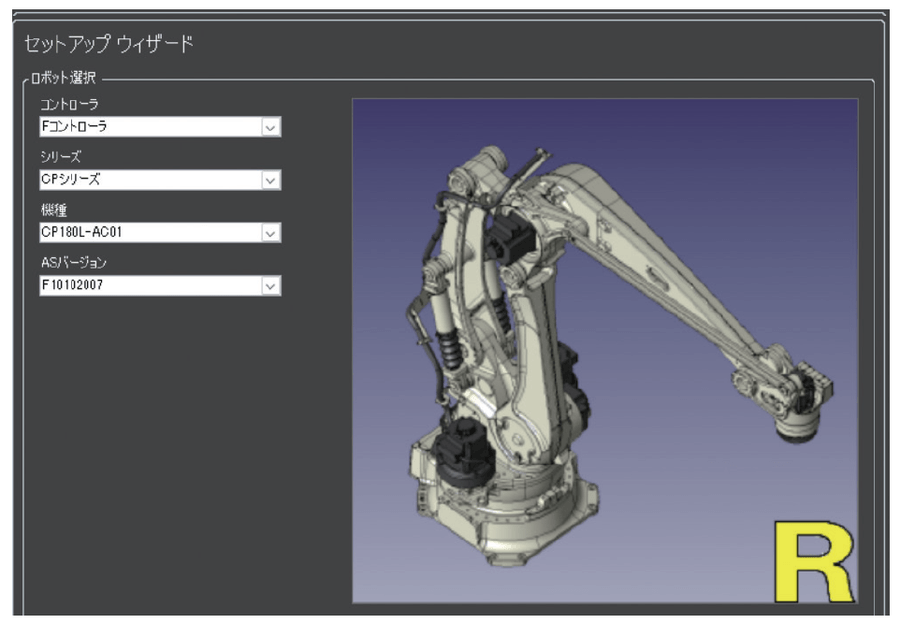
川崎重工のロボットCP、RDシリーズに対応した設定が自動で適用されます。機種ごとの動作特性や制約も考慮されるため、初期設定の手間が省けます。
2.レイアウトパターンを選択
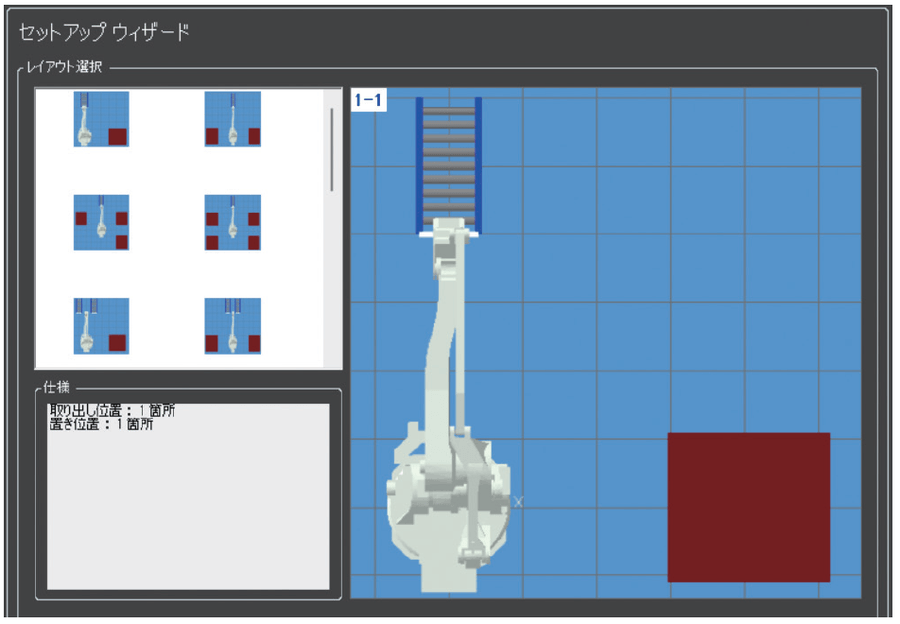
複数のレイアウトテンプレートが用意されており、選択するだけで最適な配置が反映され、設計時間を大幅に短縮できます。
3.ワークとパレットの寸法を確定
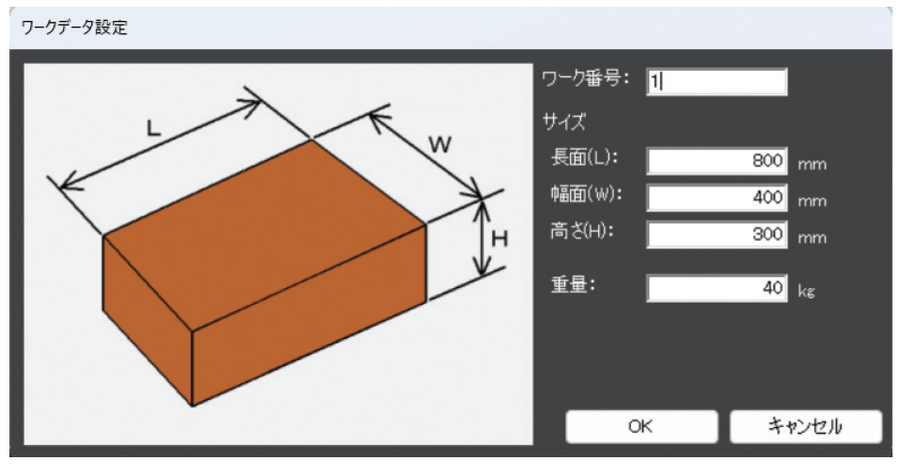
箱型や袋型など、さまざまな形状のワークに対応。寸法を入力するだけで、積み付け条件(高さ、間隔、安定
性など)が自動的に定義されます。
4.積付位置を自動作成
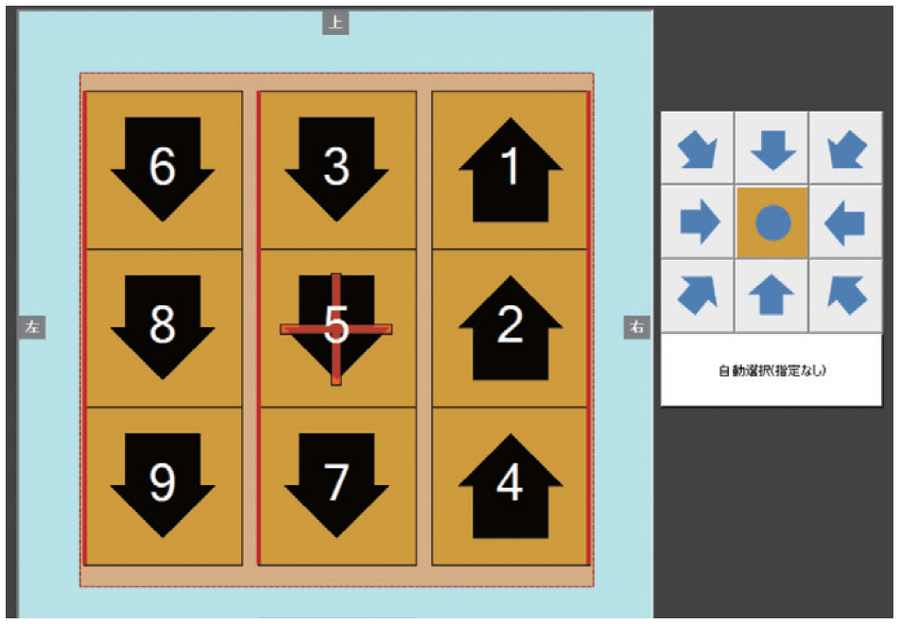
積付位置は、専門的な知識がなくても、100種類以上の標準搭載パターンから選択するだけで、自動作成できます。
5.積付位置をロボットに読み込み
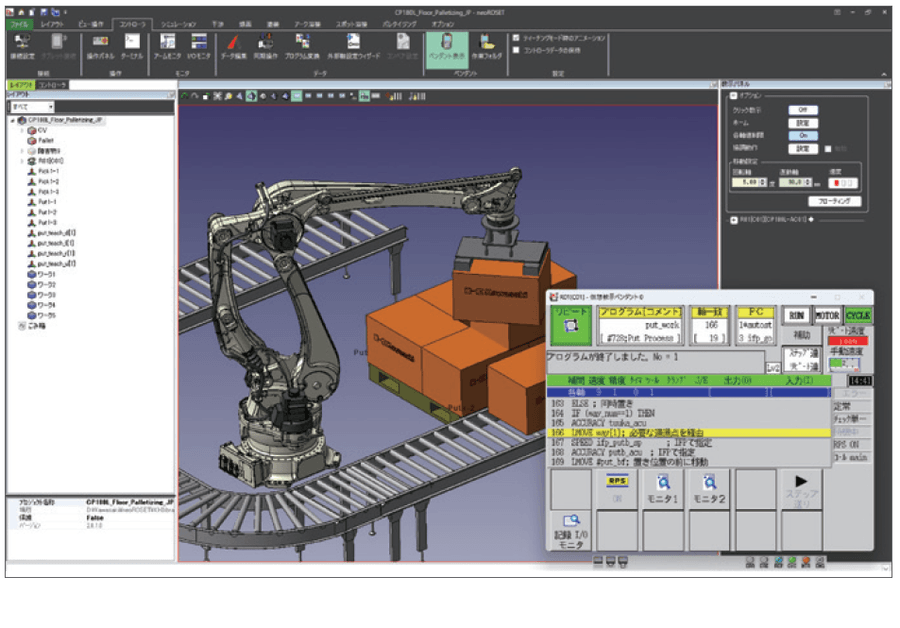
自動作成された積付位置データを仮想ロボットに転送し、neoROSETで事前の干渉確認と正確なサイクルタイム確認が可能です。
6.プログラムの実行を指示
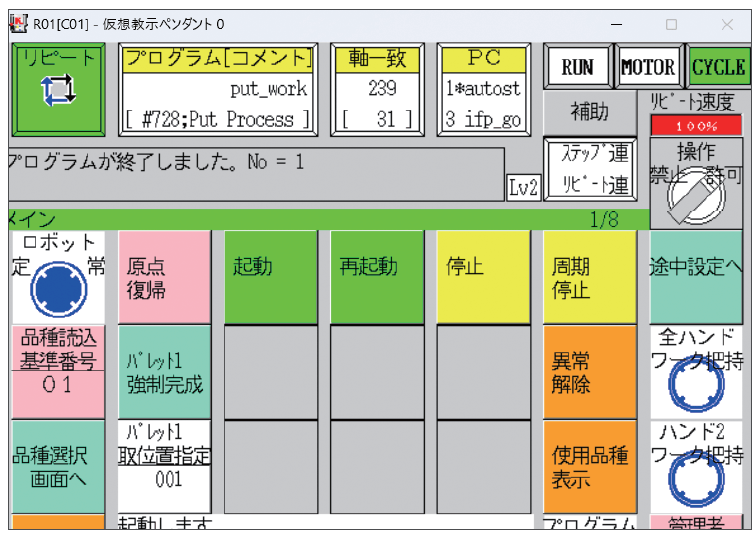
直感的な操作が可能な仮想ティーチペンダント(TP)を使用して、品種やパレット番号を設定し、シミュレーションできます。また、上位制御装置とロボット側のインターロック用信号の標準割当も準備しており、現場への導入がしやすくなっています。