導入
川崎重工は、労働力不足などの社会課題の解決に向けてロボットの活用を推進しています。これまでは、工場内への産業用ロボットの導入を進めてきましたが、これからは社会の中でよりロボットが必要とされている領域への展開を進めていきます。特に、サービス業である飲食、医療、介護の世界での労働力不足は切実さを日々増しており、ロボットの導入が急務となっています。
活動の紹介
そのような中で、当社は羽田イノベーションシティに産業ロボットだけでなくソーシャルロボットを活用したロボットの実証実験場(Future Labo Haneda:以下FLH)を開設し、ロボットによる調理・配膳・清掃を行うレストランを運営しています。工場外である立地を活かし、少し先の未来を先行評価し、これからの社会を支えるアイデアや共創できる仲間づくりを進めています。

ISO31101の世界初導入
2023年11月10日、日本が主導してソーシャルロボットの安全運用マネジメントに関する国際規格(ISO31101)が正式に発行されました。多くのロボットシステムは人、組織、ロボット、周辺環境が連携をとり、ホリスティックな運用が必要であること、またその重要性を日本からの発信し、認められた成果といえます。この規格は、日本のJIS Y1001をベースにしており、ソーシャルロボットの安全性を確保するための基本的な内容を示しています。特に、ロボットに対する知識が十分ではない不特定多数の人を対象に、いかに安全性を確保するかがポイントとなっています。FLHではこの規格を世界で初めて適用するとともに、継続的に運用しています。運用の中で運用者が現状の課題を整理して改善活動を日々進め、ロボットシステムとその運用のレベルアップ活動を推進しています。
ロボットレストラン運営での改善活動例
FLHではISO31101活動を通して、改善活動を進めてきました。その中の活動例を紹介いたします。レストラン事業はお客様へのホスピタリティが重要であり、従業員はお客様が喜んでいただけることが価値観となります。そのため、お客様への配慮やおもてなしと並行して人とロボットのインタラクションや作業遂行状況も確認する必要がレストランスタッフには求められています。そして、ロボットを扱う技量やスキルによらず、誰もが“気軽にロボットを止められる”技術と仕組みが期待されています。
安心停止の実装と効果
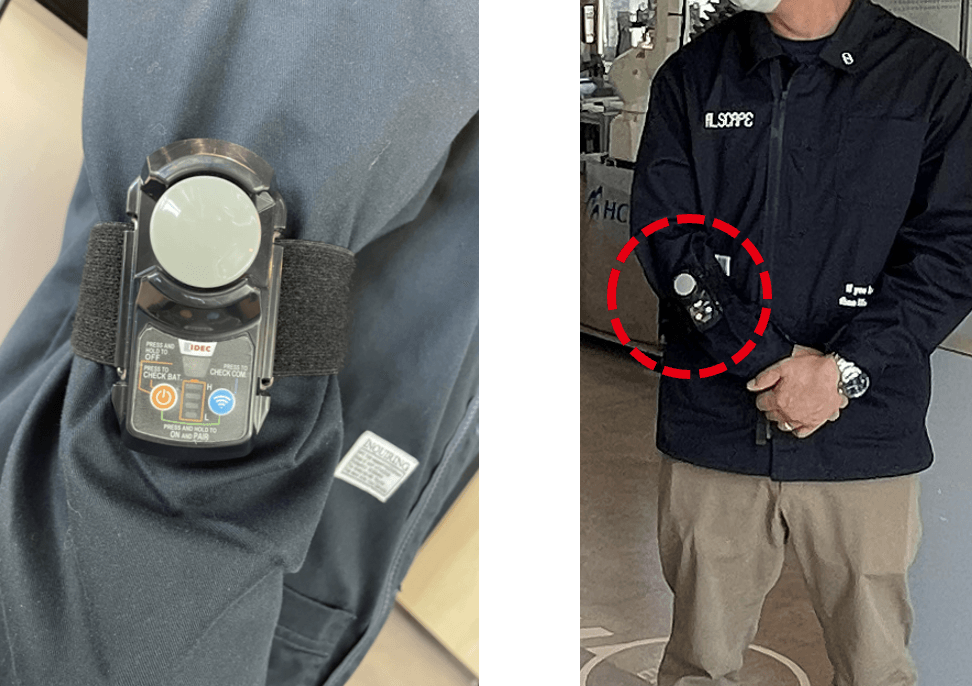
FLHでは、稼働するロボットに安心停止スイッチを実装し、その効果を検証しています。例えば、厨房で調理作業を行っているロボットに安心停止スイッチを適用し、異常を検知した際に速やかに一時停止できるようにしました。これにより、作業者は躊躇せずに停止操作を行い、状況を確認することができます。
安心停止の概念と重要性
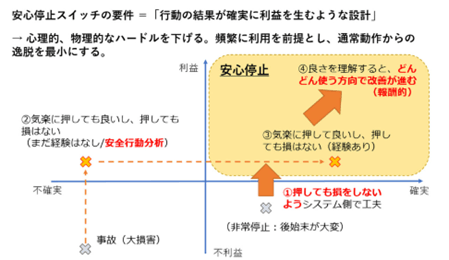
「安心停止」は、非常停止とは異なり、ロボットの動作を一時的に停止させるように設計されています。非常停止は急峻な停止を伴うため、復旧手順が複雑化することがありますが、安心停止はそのような問題を回避し、利用者が気軽に停止操作を行えるようにすることを目的としています。
安心停止は、ロボットや機械が異常を検知した際に迅速かつ安全に動作を停止させるための重要な機能であり、特にロボットが人と共存・協働する環境では、安全停止の仕組みが不可欠です。従来の機械安全では、機械自体の安全性を確保することが主な目的でしたが、近年では人と機械が協調して作業を行うための安全性が求められています。
安心停止スイッチの効果の確認
FLHにおける安心停止スイッチと非常停止スイッチの利用結果を比較したところ、安心停止スイッチが利用者にとってより安全で効果的であることが確認されました。具体的には、調理用のロボットの異常に気付いて非常停止をする場合は、作業者が非常停止スイッチの場所に駆けつけてボタンを押す必要があり、またロボットが急停止することでダメージを受ける可能性があります。また、不具合があるかどうかがはっきりしない場合も,本当に不具合がありそのままだと損害が発生すると分かるまでは止めないという判断をすることも想定されます。一方で、今回導入した安心停止スイッチを押す場合は、遠隔で一時停止できるので、躊躇せずに気楽にすぐに停止して状況を確認することができます。実際に不具合があった場合も、一時停止のまま対処できるように設計されています。これにより、安心停止スイッチを押すことで良い結果が得られ,次回も何かあればすぐにスイッチを押そうという学習がなされます。
デジタルプラットフォームとの連携とこれから
今回のサービス領域での活動からもわかるように、レストランのユースケースの社会定着には、ロボット・周辺技術・これらを支える運用や仕組み、そして継続的な運用・改善を進める組織活動が必要です。急速な労働力不足に対応するためには個別の活動だけでなく、得られた知見やノウハウを社会的に共有・共創され育てていく必要があり、そのための基盤やしくみが必要です。
人々が日常の多くの時間を過ごしている住宅やオフィスビル、商業施設、病院等へ人協調ロボティクスの基盤技術を社会実装することで、労働人口減少対策、高齢者・障がい者の生活の質向上、子育て世代の可処分時間の延伸などへの貢献が期待されます。これらを実現するためには、ロボットの社会展開を支えるデジタル基盤づくりが必要となります。特に複数種類のロボットの活用とそれぞれのロボットの相互連携、ロボットのシステムインテグレータとの連携や共創が必要となります。また、産業用ロボットとソーシャルロボットをまたぐ領域の取り組みも加速されることが予想されます。このような活動を支える仕組みづくりは、まさに黎明期であり、今後の技術展開が大いに期待されています。
川崎重工は、Future Lab HANEDAでの実証実験の場をKAWARUVAへと統合し、様々な事業とのデジタルプラットフォームの活用推進やロボットとの連携・実証など、社会課題解決に向けた活動を推進していきます。