川崎重工はヒューマノイドロボットKaleidoを2015年から開発開始し現在に至るまで様々なアップデートを繰り返してきました。2023年12月に開催された2023国際ロボット展では最新モデルである8代目が披露されました。 8代目KaleidoはKaleidoシリーズのコンセプトであるロバストヒューマノイドプラットフォーム(Robust Humanoid Platform)の名の通りロバスト性(強靭さ、堅牢さ)を強化することに加え、新たな機能を実装しました。最新モデルの進化や特徴を紹介します。
8代目Kaleidoの進化
8代目Kaleidoは、ソフトウェアとハードウェアの面からバージョンアップを行いました。アップデートのポイントを紹介します。
ロバスト性の向上を目指したバランス制御
ソフトウェア面から、更にロバスト性を向上しました。成果の一つとして、バランスを崩しかけた際に足の着地位置をリアルタイムに修正しバランスを保つ技術を実装しました。この技術は、腰に取り付けられた姿勢センサから体の傾きと速度をセンシングし、どこに着地すればヒューマノイドロボットが転倒しないかを常時計算しています。
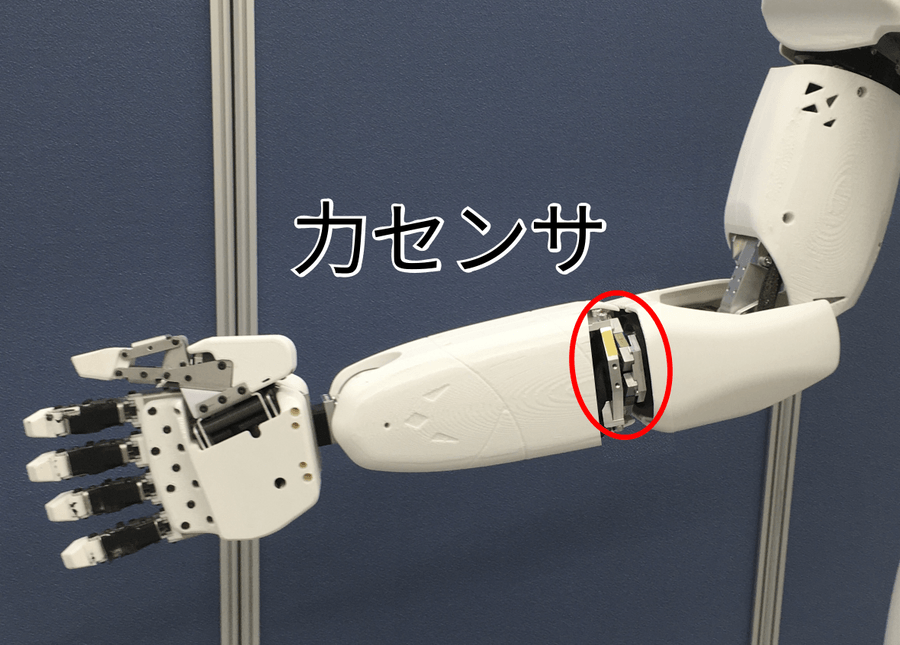
力覚センサで腕にかかる力を検出
新たに肘にも力覚センサを搭載しました。Kaleidoの足首に搭載しているセンサと同じもので、軽量でコンパクトな点が特徴です。これにより、手首以外の前腕にかかる力やモーメントをダイレクトに検出することができるようになりました。
球面モニターで多彩な表現を可能に
無機質だった頭部のデザインに、新たに球面モニターを採用しました。内部にプロジェクターを搭載し、動画やテキストなど様々な映像を投影できる仕組みになっています。人間のように表情が映し出されることで、ヒューマノイドロボットならではのコミュニケーションや意思表示の役割を果たしています。
さらに、今機体から実装を開始し、現在開発中の新しい機能についても少し紹介します。
アバターへの活用
人による操縦機能のテストとして、市販のモーションキャプチャデバイスを使用した、リアルタイムテレオペレーションシステムの開発を行っています。Kaleidoの社会実装を見据えたとき、定常的な作業は自動で行い、非定常的な作業は人による操縦で行う、ハイブリッド的な仕組みが考えられます。この機能は、昨今注目を集めているAI制御の導入に向け、ロボット実機の作業データの収集に活用することも可能です。
国際ロボット展2023で見せたヒューマノイドKaleidoの可能性
国際ロボット展2023(iREX2023)では、「人とロボットが共生する社会」をコンセプトに、Kaleidoは被災地の避難所での物資運搬を想定したデモンストレーションを行いました。 今回披露したデモンストレーションの中から2つの場面をピックアップして紹介します。
ロボットが箱を運び、人が箱から荷物を取り出す
ロボットには単純作業や力作業を任せ、人間が得意なことは人間が行います。それぞれが得意なことで役割分担して協力する姿をお見せしました。


一つの机を人とロボットが一緒に運搬する
人間が一人で出来ないことはロボットが手伝ってくれます。人手が足りず困っている場面ですかさずロボットが駆けつけ、息を合わせて共同作業を行いました。

机を運ぶという簡単な動作ですが、実は人とロボットによる共同作業は難しく、流動的な人間の動きに合わせたロボット側の工夫が必要です。
具体的には、人の微妙な押し引きの力を受けたときに、足裏の力センサで重心を計測し、転倒しないよう足首のトルクを制御しています。この制御があることで、人とロボットの共同作業を実現しています。
iREX2023でのデモンストレーションの様子はこちらの動画でご覧いただけます。
人とロボットが同じ空間で作業を行う様子は、人間とロボットの垣根を超えた、未来のロボット共生社会におけるKaleidoの可能性を感じていただけたのではないでしょうか。
ロボットが当たり前に働く社会の実現に向けた開発の場:CO-CREATION PARK KAWARUBA
この度、羽田イノベーションシティの一角に、産学官連携や他企業との共創の場として、「CO-CREATION PARK KAWARUBA(コークリエーションパーク カワルバ)」を開所しました。
これまで明石を拠点としていたKaleidoや 双腕自走式ソーシャルロボットNyokkeyの開発を、より多くの人が集まる東京・羽田に場所を移し、共創活動を通じて川崎重工のソーシャルロボットの社会実装の実現に向けて開発を加速させていきます。今後の展開に乞うご期待ください!

おすすめ記事
ヒューマノイドロボット開発最前線