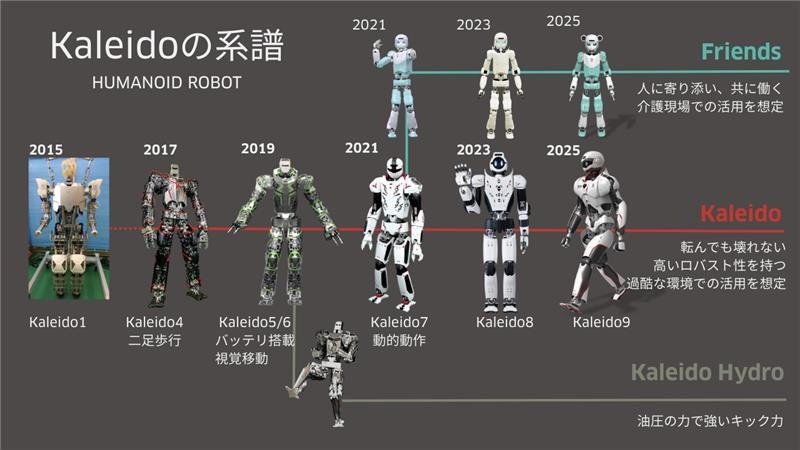
「ロボットと生きる 喜び豊かな未来をささえる」をパーパスに掲げる川崎重工のロボットディビジョン。人とロボットが共生する社会を目指して様々なロボットの開発を進めています。人とロボットが共生する社会の究極のロボットの形として開発を進めているのはヒューマノイドロボットです。初号機から8代目の系譜をご紹介します。
ヒューマノイド開発のきっかけ
川崎重工は、国産初の産業用ロボットを製造したリーディングカンパニーとして、工場の製造ラインで使用される産業用ロボット分野をリードしてきました。半世紀以上に渡る産業用ロボットの開発・製造で培った知見を元に、人の隣で作業することができる協働ロボットduAroや、ロボットのティーチングの難しさを解消する遠隔操作ロボットシステムSuccessorなど、工場や安全柵の外側でも、人の役に立つロボットの開発・製造してきました。その究極のロボットの形として、ヒューマノイドロボットを開発しています。ヒューマノイドは二本の足で移動し、二本の腕を使って作業ができるため動作の自由度が高く、人の作業を置き換えることが可能です。
2015年、初号機
2015年頃からヒューマノイドロボットの開発に着手しました。固定された産業用ロボットを製造してきた当社にとって、二足歩行するロボットの開発は大きな挑戦でした。
人間のような形をロボットで再現するため、どのようにモーターと間接機構を配置すれば良いのかの検討から着手しました。人間の体を参考に開発を進めれば進めるほど、人間の体がいかに複雑で柔軟にできるかを痛感し人の動きを再現するのではなく、人間の身体から必要な機能を抽出してモーターで代替するなど発想を転換することで二足歩行を実現しました。
産業用ロボットとヒューマノイドロボットで最も異なるのが、支えなければならない重量の大きさです。一般的な100kg可搬の産業用ロボットの本体重量は600kgを超えており、自分の重さより軽いものを持ち上げる設計となっています。しかし、ヒューマノイドは自重よりも大きな重量を持ち上げる必要があり、徹底した軽量化が重要でした。

1号機は脚剛性が低く、特に膝部分の機構がねじれに弱かったため歩行が不安定でした。
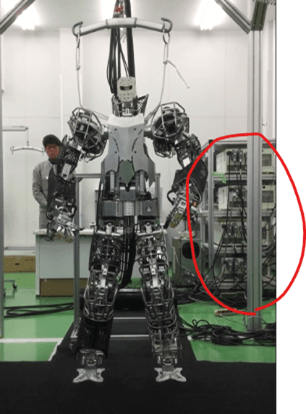
3号機までは産業用ロボット用のEコントローラーを使用していました。大きくてヒューマノイド用途には制御周期が遅いなど性能が合致しない上に、4台も必要だったためコントローラーだけで多くのスペースを必要としていました。この後、Fコンそしてヒューマノイド専用コントローラーになったため改善されました。
転倒は機体が壊れる恐れがあるためヒューマノイドにとっての一番の大敵です。転倒に耐えられるか、受け身を取らせながら転倒する試験繰り返し実施しました。
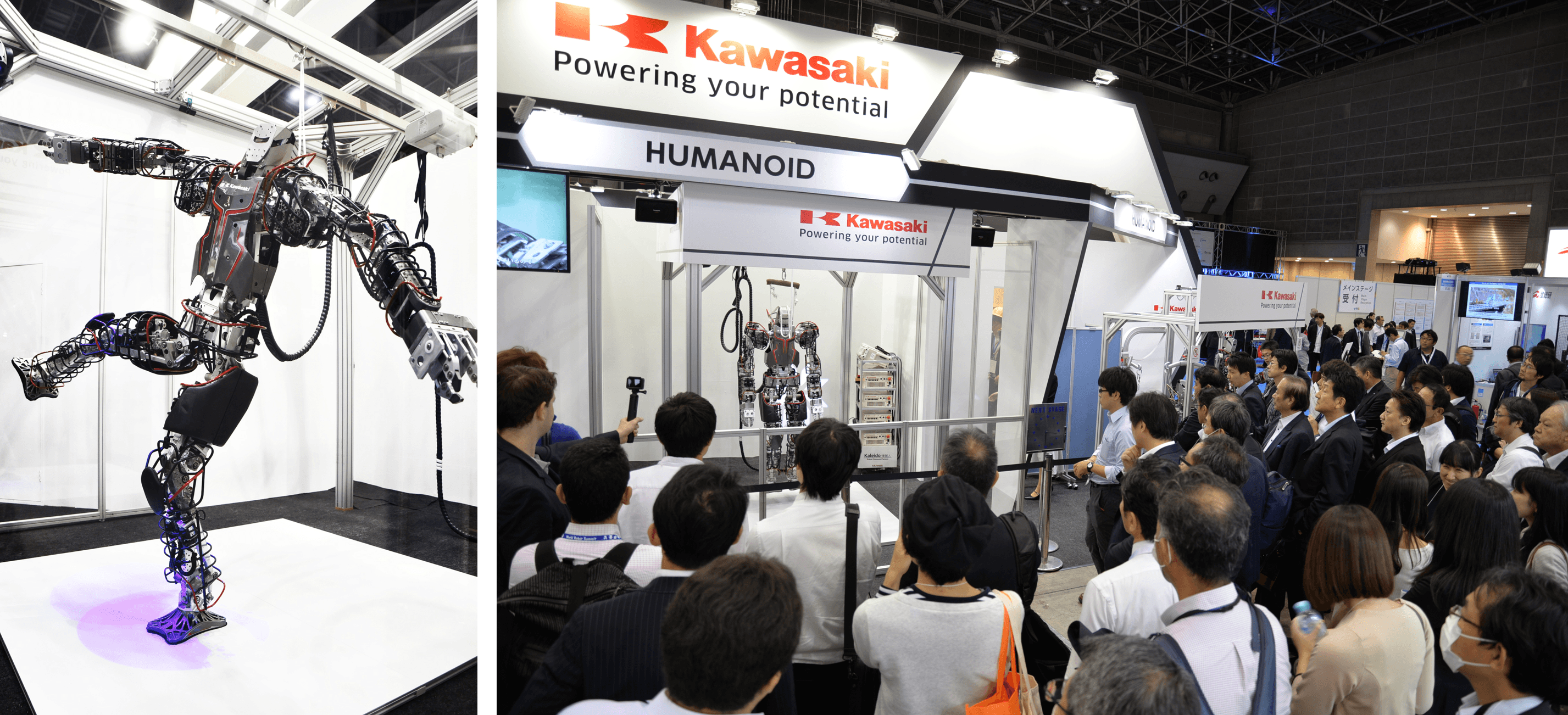
2017年、初公開
ヒューマノイドロボットKaleidoとして、その姿を初めて公開したのはロボットの大きな展示会である国際ロボット展2017(iREX2017)でした。起き上がりや懸垂などのデモを披露しました。身長175㎝、体重85㎏。この時はまだ外部給電だったため電源コードをつないでのデモとなりました。

Fコントローラーへの変更により多少小型化されたものの、重量は30kgあり、
ヒューマノイドに搭載させるにはまだまだ大きかった。
2019年、バッテリー搭載型へと進化、軽量化への道のり
バッテリーを搭載での二足歩行をお披露目しました。この時のKaleidoは身長178cm、体重85kg。重量を保ったまま、4台の外部コントローラーを小型で高性能なアンプ、モータコントローラに置き換え、電装一式をロボットの体内に内蔵。さらに、駆動電源としてバッテリー搭載を採用したことで、完全スタンドアローン化を実現しました。
重量を保ったままスタンドアローン化を実現させるために、様々な開発を行いました。まず、着手したのは骨格と外装の工夫です。骨格部品に、アルミより軽量なマグネシウム合金を採用。また、これまで金属フレームを使って制作していた外装を3Dプリンターによる樹脂製に変更したことが、大幅な軽量化に一役買いました。さらに、樹脂製の外装は社内で製造できることから試作スピードを格段に向上させることができました。
大きな軽量化だけでなく、気の遠くなるような地道な軽量化を数多く行いました。その中で、軽量化のし過ぎでもろくなってしまった部分もあり、せっかく軽量化したパーツも後に元に戻さざるを得なくなるなど一進一退を繰り返しました。どこに問題が発生するかをあらかじめ予測することは非常に難しく、実際に製作し、試して、改良する作業を根気よく繰り返しました。
歩行制御開発:力センサ開発
機体が揃ってきたことから、本格的に歩行制御の開発を開始しました。制御に必要な力センサの開発もこの時期に実施ししました。ヒューマノイドロボットの歩行制御には、足首に6軸力センサをつけて行うことが一般的ですが、市販の6軸力センサは、非常に精度は良い一方、高価で重く衝撃に弱い、という特徴を持っていました。足踏みやジャンプを行うヒューマノイドロボットにとっては、軽くて衝撃に強いことが必須であるため、条件に合う力センサを開発する必要がありました。

2021年、派生型Friends登場
パワフルなKaleidoに対して、スリム化を目指しFriendsが開発されました。狭い場所での作業を想定し開発されましたが、介護など日々の生活を支える役割が期待されています。
親しみやすい見た目
Friendsは、家庭や介護施設など人が生活する環境に溶け込めるよう、曲線を意識した柔らかな印象を目指しました。親しみを感じてもらうため、目元にはモニターを使用して、人間のように感情を表現できるようにしています。また、Friendsという名前には、“人と友達になれるロボットにしたい”という思いが込められています。
会話、ジェスチャー機能開発
大阪大学長井研究室との共同研究で、会話・ジェスチャー機能を開発しました。これは、これまで開発してきたヒューマノイドロボットの中では初めての試みでした。会話はAIを活用し、投げかけられる質問に対して生成された回答をFriendsは音声で出力する。同時に、応答に対応したジェスチャーを交えることで、人間らしいコミュニケーションを行うことができます。

日本化学未来館のイベントにて子供たちからの質問に答えるFriends。対話のクオリティは完璧とはいかなかったが、会場は満席状態で、ユーモアのあるやり取りに笑い声があがることもありました。
2023年、安定歩行
ソフトウェアとハードウェアの両面からバージョンアップを行いました。ロバスト性を向上させるために、バランスを崩しかけた際に足の着地位置をリアルタイムに修正しバランスを保つ技術を実装しました。これにより、転倒のリスクを減らすことができました。
ヒューマノイドロボット開発のこれから
ロボットは3K(きつい・汚い・危険)な作業から人を解放する存在として期待されています。一方で、ロボットは事前に作業をティーチングし、同じ作業を繰り返しすることを得意としており、事前に予測できない作業のロボット化が難しいのが現状です。そこで、ヒューマノイドロボットを用いて遠隔操縦が実現できれば、危険な現場での作業をヒューマノイドに任せて、操作者は都市部にいても世界中でヒューマノイドロボットを操作することが可能となります。災害現場など足場が悪く、二次災害が起こりやすい現場などでの活用が期待されます。
2025年12月には国際ロボット展2025(iREX2025)が東京ビッグサイトで開催予定です。川崎重工ブースでは最新のヒューマノイドロボットRHP Kaleido 9を出展する予定です。あなたの隣でヒューマノイドロボットが働く未来を目指して、日々進化しているヒューマノイドロボットを見に是非会場にいらしてください。