近年、世界中でヒューマノイドロボットへの関心が急速に高まっています。
しかし、川崎重工がヒューマノイドの研究開発に着手したのは、このブームが訪れる前の2015年のことでした。それから約10年。改良を重ね続け、9世代目として登場したのが「Kaleido9」です。
ヒューマノイドは「万能」ではない。だからこそ見えてきた役割
川崎重工は、ヒューマノイドを「何でもできるロボット」とは位置づけていません。
あらかじめ作業が決まっている工程や、タクトタイムが厳しく求められる生産ラインでは、専用機や産業用ロボットの方が合理的です。それでも、あえて人型であることに意味がある場面があります。
- 人が使う設備・工具・階段をそのまま使える
- ロボット専用の環境整備が不要
- 災害現場など、事前に作業を想定しづらい場所で柔軟に対応できる
「人間の世界にロボットを合わせる」という発想こそが、ヒューマノイドの最大の価値だと考えています。
Kaleido9の進化ポイント①
「倒れにくさ」を大幅に向上させた構造設計
Kaleido9では、前世代(Kaleido8)から大幅な構造強化が行われました。特に脚部は、販売開始を見据えて部品定格を厳守する設計へと刷新。トルクを維持したまま動作速度を向上させることで、バランスを崩した際に素早く脚が出るようになり、川崎重工が作るヒューマノイドの最大の特徴であるロバスト性が大きく向上しています。
Kaleido9の進化ポイント②
「見て、判断して、歩く」自律歩行
Kaleido9は、周囲の環境を認識しながら自律的に歩行することができます。
デモンストレーションでは、人や障害物の割り込みを検知して回避、階段の段差を認識し、角を踏まないよう歩幅を自動調整、といった、人間に近い判断をリアルタイムで行う様子が紹介されました。この自律歩行は、LiDAR(Light Detection And Ranging)による自己位置推定(SLAM)によって支えられています。
Kaleido9の進化ポイント③
直感的な「遠隔操縦」という現実解
ヒューマノイドにAIを搭載し、完全自律で動かす──その実現には、まだ多くの技術課題があります。川崎重工が描く現実的なステップは、次のようなものです。
- 遠隔操縦による運用
- 高度作業のみ人が操作、単純作業はAIに任せるハイブリッド型
・将来的な完全自律化 Kaleido9では、ヘッドマウントディスプレイを用いた直感的かつリアルタイムな遠隔操縦が可能となり、災害救助を想定したデモも行われています。
「歩く」だけじゃない。Kaleidoステーションという発想
もう一つユニークなのが、Kaleidoステーションです。これはヒューマノイド用の移動装置で、平地の長距離移動では車輪で効率的に移動し、現場ではKaleidoが立ち上がって作業を行うという運用を想定しています。将来的には充電ステーションを兼ねる構想もあり、「人型」と「車輪」を使い分ける、社会実装を見据えた現実的なアプローチを目指しています。
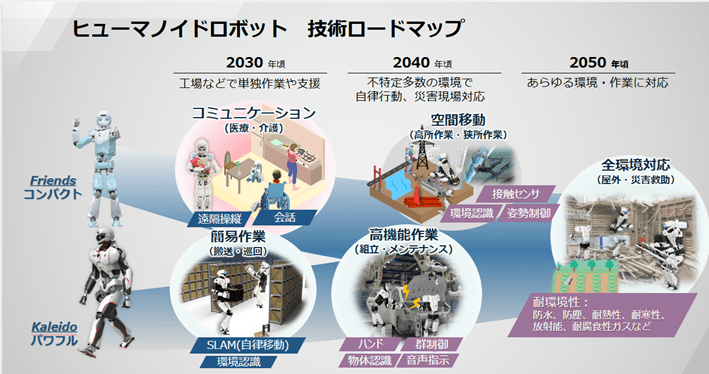
技術ロードマップ:ヒューマノイドは段階的に進化する
ヒューマノイドロボットは、いきなりすべてを自律的にこなせる存在になるわけではありません。
川崎重工では、ヒューマノイドの社会実装は段階的に進んでいくものだと考えています。
2030年頃:工場などで単独作業や支援
まず2030年頃には、工場やプラントなど管理された空間を中心に、遠隔操縦による単独作業や人の作業支援から活用が進んでいきます。
この段階で必要となる技術は、遠隔操縦、会話、音声指示、SLAM(自律移動)、環境認識といった、人とロボットをつなぐ基盤的な要素です。 人が判断を担い、ロボットが身体能力を発揮することで、人が使ってきた設備や工具をそのまま活用できる点が、人型ロボットの強みとなります。
主な活用シーン
• コミュニケーション(医療・介護)
• 簡易作業(搬送・巡回)
必要となる主な技術・性能
• 遠隔操縦
• 会話・音声指示への対応
• SLAM(自律移動)
• 環境認識
2040年頃:不特定多数の環境での自律行動と応用拡大
次に2040年頃には、不特定多数の環境下でも周囲を認識しながら行動できるようになり、高所作業や狭所作業、災害現場といった、より複雑で変化の大きい現場での活用が視野に入ってきます。このフェーズでは、環境認識の高度化、姿勢制御、接触センサ、ハンド制御、物体認識、群制御といった技術が求められます。
自律移動や環境認識といった基盤技術に加え、作業そのものを成立させるための制御技術が、こうした応用を支えます。
主な活用シーン
• 空間移動(高所作業・狭所作業)
• 高機能作業(組立・メンテナンス)
必要となる主な技術・性能
• 接触センサ
• 環境認識
• 姿勢制御
• ハンド
• 群制御
• 物体認識
• 音声指示
2050年頃:あらゆる環境・作業に対応するヒューマノイドへ
そして2050年頃には、屋内外を問わず、あらゆる環境・作業に柔軟に対応できるヒューマノイドへと進化していくことを目指しています。
この段階では、全環境対応を前提とした技術に加え、防水・防塵、耐熱性、耐寒性、放射能耐性、耐腐食性ガス対応など、高い耐環境性能が不可欠となります。
事前に作業内容を想定しづらい現場においても、人と同じ環境で動き、人の代わりに作業を担えることが、ヒューマノイドの本質的な価値です。
主な活用シーン
• 全環境対応(屋外・災害救助)
必要となる主な技術・性能
• 耐環境性(防水・防塵・耐熱性・耐寒性・放射線耐性・耐腐食性ガスなど)
最終的なゴールは「災害現場」
川崎重工がヒューマノイド開発で見据える最終的な適用先は、災害現場です。日本は自然災害が多く、事前に想定できない状況での対応が求められます。派手なパフォーマンスはしないけれど、人と同じ環境で動き、倒れても壊れにくく、信頼して使えるロボット。Kaleido9は、その未来に向けた確かな一歩として進化を続けています。