川崎重工は、ロボット手先にラインカメラを搭載して複雑曲面を持つ製品の外観検査を高速で行うロボット技術「高速パルス出力機能」を開発し、販売を開始します。
製造現場では複雑曲面を持つ製品の表面のキズ・異物有無・凹凸などの外観検査の大半を人が目視で行っています。そのため、慢性的な熟練検査員不足、長時間の目視検査による検査ミス、トレーサビリティが取れないといった課題から外観検査自動化のニーズが高まっています。
曲面の外観検査においてエリアカメラを用いた場合、撮像領域を細分化して断続撮像するため検査に時間を要するという課題を抱えていました。
当社が新開発した「高速パルス出力機能」と走査型撮像ができるラインカメラを組み合わせることにより、曲面に沿った高速連続撮像が実現しました。1,000㎜/sのロボット高速移動時においても0.1㎜間隔(一定距離間隔)でパルス出力が可能です。


●ラインカメラと組み合わせて使用する事で検査時間を大幅に短縮
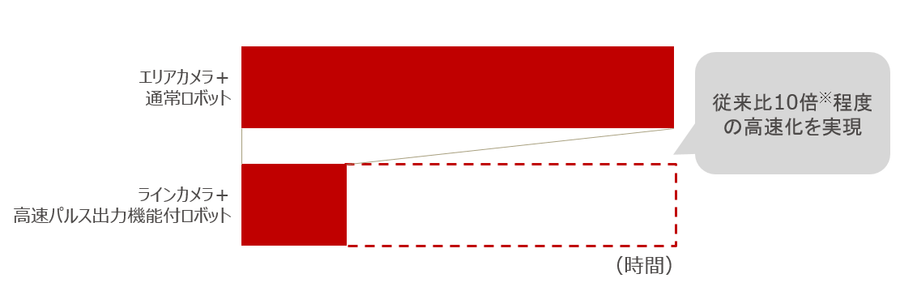
一例として、検査用カメラで多数の実績を持つ株式会社デクシス(以下デクシス社)の曲面検査用ラインカメラと当社製ロボットを組み合わせた適用試験を実施いたしました。デクシス社のラインカメラは、独自の曲面画像取込み機能(ダイナミックトレーシング)を有しており、ロボットによる曲面走査と組み合わせることにより2方向曲面の撮像が可能です。当社の高速パルス出力機能を活用し走査型検査システムを構築することにより、複雑曲面の走査型検査を従来と比較して10倍※程度の高速化が可能となります。
当社は、今後も労働力不足の解消や検査品質の安定化といった検査分野の課題を解決するため、ロボットを活用したソリューションを引き続き提供していきます。
※使用機材・撮像条件による。
2.製品動画
3.お問合せ(産機ロボット総括部 産機営業部)
本件に関するお問い合わせは こちら
Tel: 0561-63-6800