ロボット仕様
- 対応ロボットRS0003N,RS005N/L,RS007N/L,RS013N,duAro1/2
- 対応ASシステムソフトー
- ロボットオプションオプション:ロボットアーム内蔵バルブ2個以上


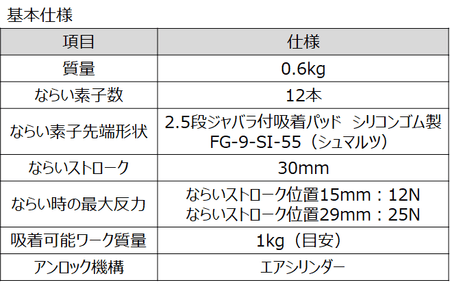
ワークの形状に合わせて変化するならい機構を持ち、複雑な形状のワークでも
安定して吸着可能な小型軽量の汎用ロボットハンドです。
ならい吸着ハンドは吸着部に絞り弁を内蔵しているため、
単一の真空源でありながら12個の吸着パッドのうち半数の吸着エラーがあってもワークの吸着が可能です。
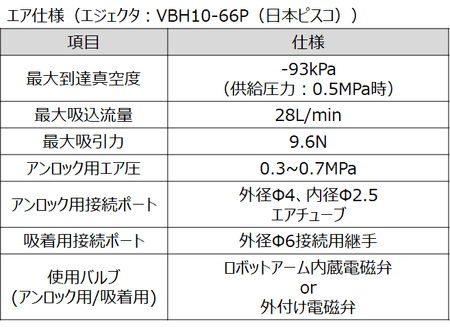
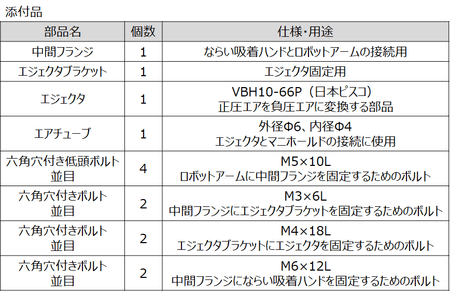
小型ロボットアームに取り付けるための中間フランジ、正圧エアを負圧エアに変換するためのエジェクタ、エジェクタを取り付けるブラケットをオプションとして追加した仕様となります。

製品本体に関するマニュアル、技術資料等については、上記製品リンクからご入手ください。