3Dビジョンとは?
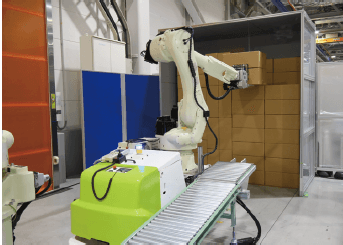
3Dビジョンは、奥行きや高さを含めた立体的な情報を認識できるため、複雑な作業に対応します。バラ積みされた部品や傾いた製品の位置を正確に把握し、最適な掴み位置を計算します。これにより、ランダムに積まれたケースや複雑な形状のワークも自動でピッキングでき、デパレタイズや障害物回避など高度な動作が可能です。


| 物体認識 | 形状・奥行・ばら積み認識 |
| 位置補正 | XYZ座標・傾き補正 |
| ピッキング | ばら積みピッキング |
| ロボット連携 | 複雑な動作・障害物回避 |
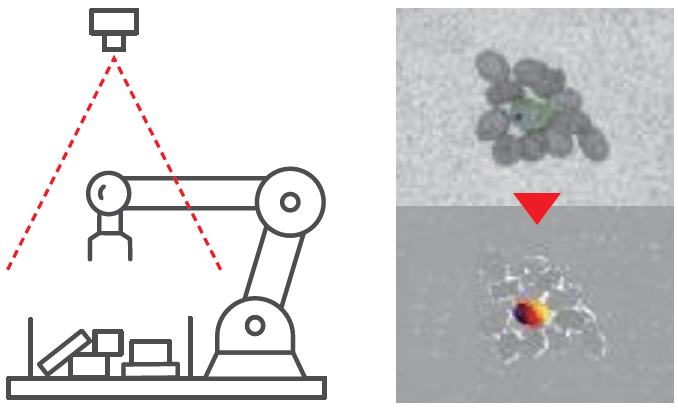
3Dビジョンでできること ~物体認識/位置補正・ガイド機能~
- X, Y, Z座標と傾き情報を補正可能
- 高さのばらつきや傾斜のあるワークの位置決め
- バラ積みピッキング時の最適な掴み位置の選択
- 奥行き情報を取得し、立体的な形状認識が可能
- バラ積み部品の認識(ピッキング用途)
- 複雑な形状や重なり合ったワークの識別
ピッキング/デパレタイズでの活用
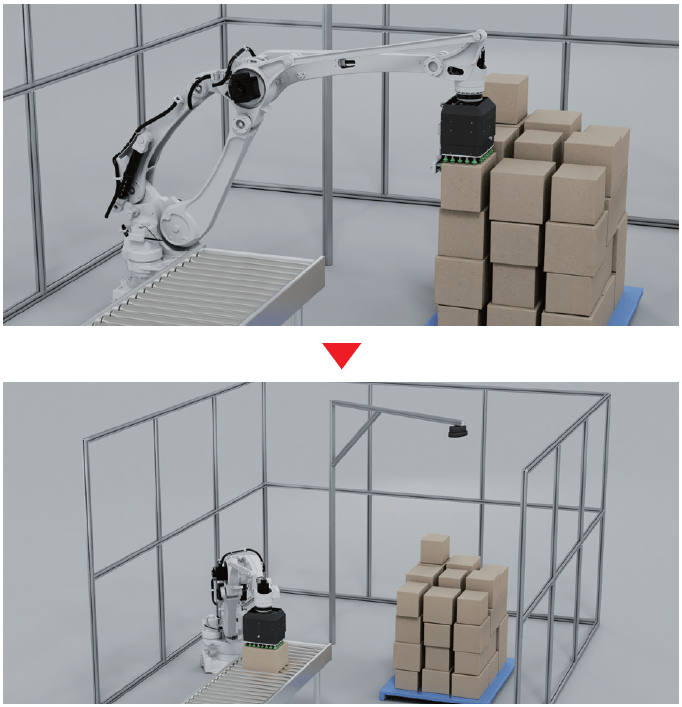
- バラ積みワークのピッキング(ランダムな配置でも対応)
- 箱や袋物のデパレタイズ(積み上げられた状態から取り出し)
- ハンドリング時の障害物回避
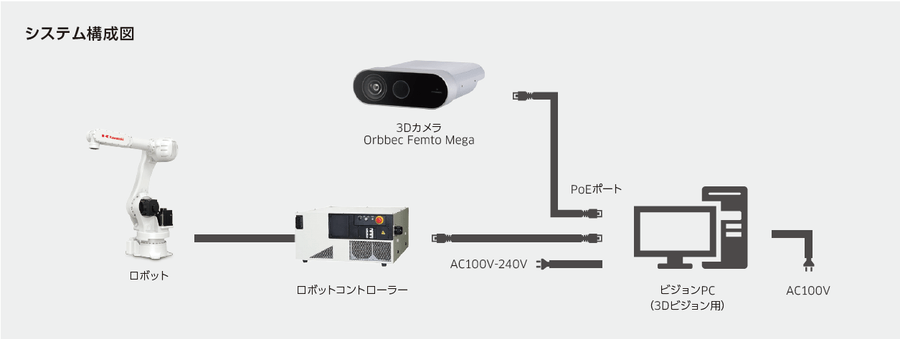
川崎重工の3次元ビジョンシステムの構成
導入事例
K-VStereoによるデバンニング自動化
川崎重工の3次元AIビジョンシステム「K-VStereo」は、混載コンテナ内のケースを高精度に認識し、位置・姿勢を把握することで、従来困難だったデバンニング作業を自動化します。K-VStereoは、ケースの形状や傾きを3DカメラとAIで解析し、最適なピック位置をリアルタイムで算出するため、斜めに積まれたケースやサイズが異なる荷物にも柔軟に対応可能です。
この技術は、自走式デバンニングロボット「Vambo」に採用され、最大30kgのケースを1時間に最大600個処理する高効率な荷降ろしを実現しました。Vamboは、RS080NロボットとAGVを組み合わせたシステムで、K-VStereoの認識データを活用し、狭いコンテナ内でも安全かつ確実なピッキングを行います。さらに、プログラミング不要の簡単操作で稼働でき、現場の負担を大幅に軽減します。