Since Kawasaki Heavy Industries manufactured the first industrial robot in Japan in 1969, we have stood as the leading robot manufacturer and have worked to develop automotive and other industries in Japan and around the world. The following outlines our history in industrial robotics, spanning more than 50 years.
1968
Signed license agreement with Unimation (USA)
1969

Started commercial production of the first industrial robot, Unimate, in Japan
1981
Started the production of an electric robot (P-series)
1983
Launched large general-purpose robot (E-series)
1986
Terminated the partnership with Unimation and started in-house development and global expansion
1989

Launched small-medium general-purpose robot (J-series)
1990
Founded a local subsidiary Kawasaki Robotics (USA), Inc. in Detroit, USA
1992

Launched large general-purpose robot (U-series)
Launched all-digital controller (AD-series)
1995
Founded a local subsidiary Kawasaki Robotics GmbH, in Neuss, Germany.
Akashi Plant (Robot Division) acquired ISO9001 certification
1996
Founded a local subsidiary Kawasaki Robotics (UK), Ltd. in the United Kingdom
1997
Launched all-digital controller (C-series)
Expanded the clean robot business
1998

Launched small-medium general-purpose robot (F-series)
Akashi Plant (Robot Division) acquired ISO14001 certification
1999

Founded a local subsidiary, Kawasaki Machine Systems Korea, Ltd. in Incheon, Korea
Launched large, general-purpose robot (Z-series)
2000

Acquired painting robot business from Kobe Steel, Ltd.
Launched horizontal articulated type clean robot (NS-series)
2002

Launched painting robot (K-series)

Launched extra-heavy payload general-purpose robot (M-series)
Launched robot controller (D-series)
2003

Launched horizontal articulated type clean robot (NX-series)
2004
Developed and launched the new technology FSJ (Friction Spot Joining)
2006
Founded a local subsidiary Kawasaki Robotics (Tianjin) Co., Ltd. in Tianjin, China
2007
Launched horizontal articulated type clean robot (NT-series)
2008
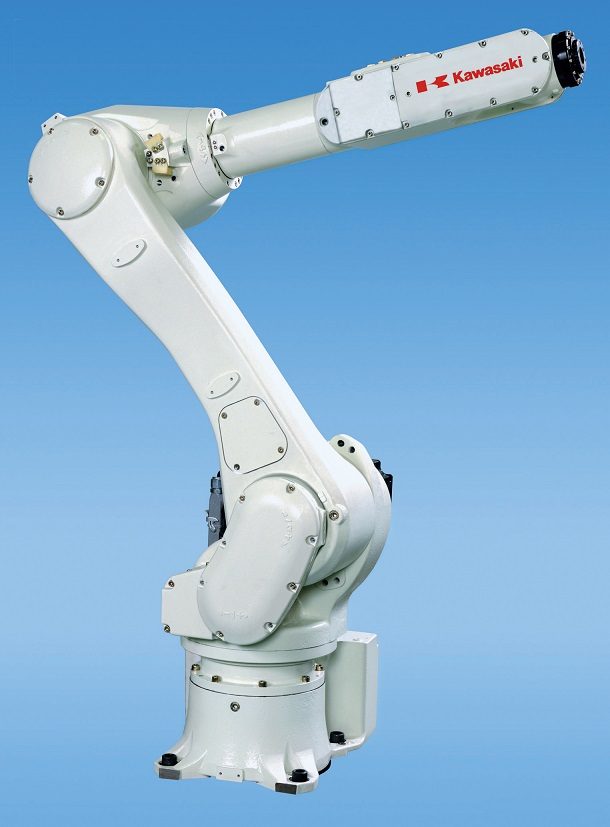
Launched small-medium, general-purpose robot (R-series)
Launched high-performance controller (E-series)
2009

Launched picking robot (Y-series, picKstar)
2011

Launched spot-welding robot (BX-series)
2013
Established Medicaroid Corporation to develop medical robots
Launched robots for medical and pharmaceutical applications (MC004N, MS005N)
2015

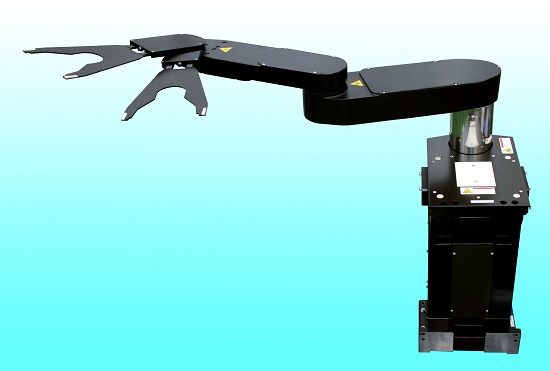
Launched extra-large payload robot, MG10HL

Launched dual-arm SCARA robot “duAro” which can collaborate with humans in work operations
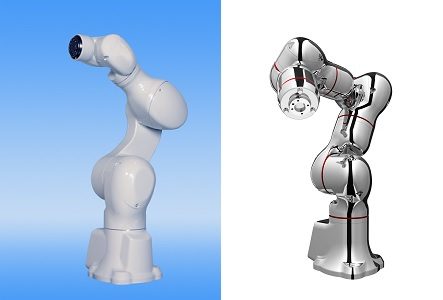
2017

Launched high-speed small payload robots, RS007N, and RS007L

Launched a new robot system “Successor” that reproduces movements of skilled workers through remote coordination
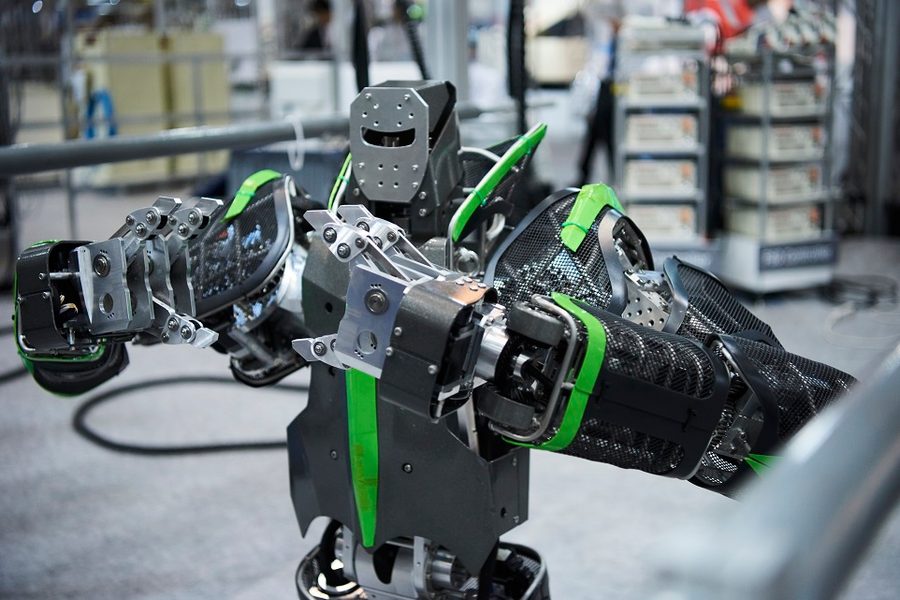
First debut of the humanoid robot “Kaleido” at the International Robot Exhibition
2018

Marked the 50th anniversary of our robotics business

Launched the collaborative dual-arm SCARA robot, duAro 2
2019

Evolved the humanoid robot “Kaleido” for practical real-life applications
About

About Robot Division

Locations

Global Network

Kawasaki Heavy Industries ltd.

ISO Certifications
