これまで川崎重工のロボット事業では、製造業を中心に自動化・省人化のソリューションをご提案してまいりました。一方で、世界では依然として多くの社会課題が存在しています。これらの社会課題をどのようにしてロボットで解決していくのか。
川崎重工はさまざまな課題に精通している企業と協力することで、ロボットの活用領域を拡大させ、更にロボットが収集するデータを活用することで社会課題の解決に貢献します。それを実現するためのプラットフォームの構想、それがKawasaki Robot Digital Platform ROBO CROSS です。
「ROBO CROSS」構想とは?
「ロボットシステムを効率的に生み出すオープン開発環境」「ロボットが収集したデータから価値を生み出すデータ活用基盤」2つの機能を有するプラットフォームです。

ロボットシステムのインテグレーション効率化

データ検索
ロボット、周辺機器、システム設計のリファレンスデータを共有
仮想試運転
デジタル空間でロボットシステムを構築し、様々な条件で検証
実機システムへの反映
仮想試運転済みのデータを実機へダウンロード、立上げ調整を短縮
ロボットに関連する様々なデータを共有し、デジタル空間で効率的にロボットシステムを開発できる環境を提供します。ここで開発したシステムを実機にそのまま移行できるように、便利な機能を準備していきます。
各パートナーが自社の得意とする分野のアプリケーションを開発し、そこで生まれた技術(ソフト・ハード)がプラットフォームに蓄積されます。
このプラットフォームに参加するパートナーが多くなるほど、強みを発揮する仕組みです。
データ活用による新たな価値創造
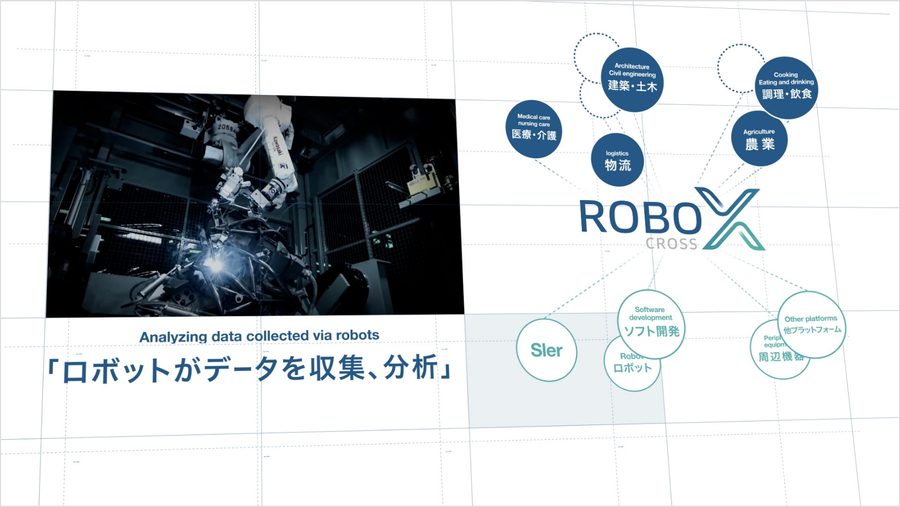
- ロボットの作業状況や周辺環境のデータを収集
- 他社プラットフォームとも連携
- ロボットシステムの継続的な進化や、全体効率の向上に活用
ロボットがセンサーとなってデータを収集することで、ロボットシステムやその前後工程の改善が可能になるだけでなく、ユーザ独自の新たな価値創造につなげていきたいと考えています。
ROBO CROSSの実現に向けて
ロボットデジタルプラットフォームの実現に向けて 川崎重工では多くの取組みを開始しています。
K-AddOn
ロボットと周辺機器の接続を容易にするため、機器メーカーと連携して、マニュアル、ソフトウェア、アプリケーション事例を提供します。
Point
- カワサキで接続確認まで実施しているので安心
- 接続のための部品やソフトの設計が不要
- 適用動画で使い方を確認

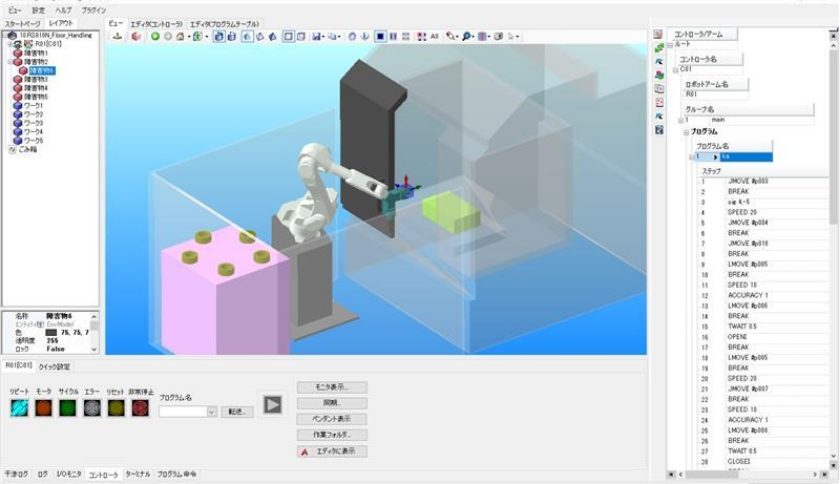
OLP
PC上のシミュレーション環境でロボット教示プログラムを作成して動作確認するツールです。現地でのロボットの教示時間を短縮することができます。
Point
- 正確な動作軌跡、タクトタイムをシミュレーションで再現
- 干渉チェック、レイアウト検証、複数ロボットの動作確認
- 複雑なワーク形状に沿ったティーチングも簡単
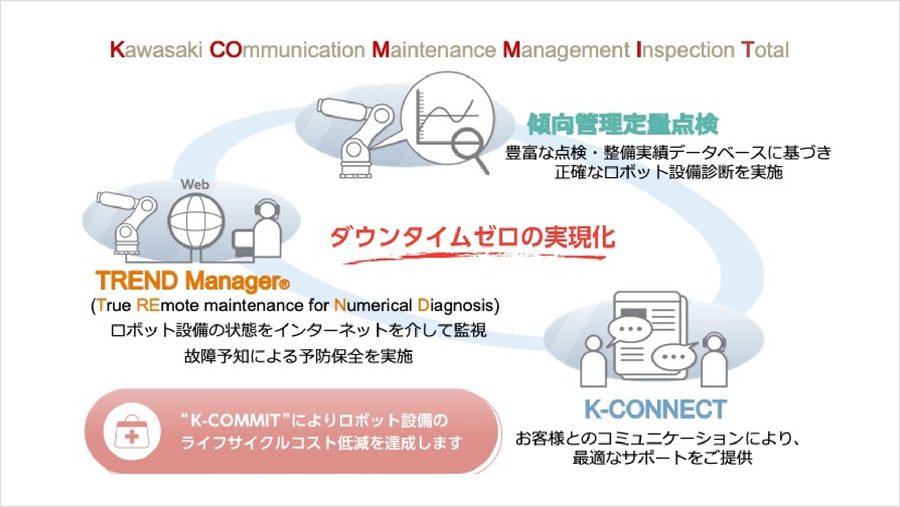
K-COMMIT カワサキロボット安心ライフサイクルサポート
ダウンタイムゼロに向けて点検、管理、分析、提案、メンテナンスを一貫して実施する正確かつ経済的なサービスパッケージ。ロボット設備の状態に応じて最適なメンテナンスプランを提案し、ライフサイクルコストの最適化に貢献します。
Point
- TREND Manager(予知保全ツール)により、ロボットのダウンタイムを低減
- 傾向管理定量点検(点検結果の数値化)により、ロボットの状態を正確にお知らせ
- K-CONNECT(コミュニケーションツール)により、お客様とのつながりを強化
関連リンク
- ROBO CROSS
- 【ROBO CROSS】ROBO CROSSが実現する「ロボットのある未来」