
ビジョンを使った異なるサイズの箱詰め作業の自動化を実現しましたのでご紹介します。
今日の労働市場は変化しています。大手コンサルタント会社のデロイトは、2028年までに米国では240万人の製造業労働者が不足すると予測しています※。労働者の雇用がますます困難になるにつれて、各企業は労働力不足を補いつつ、事業を成長させるのに必要な力と柔軟性を自動化により達成しています。
労働力不足の問題を回避するため、米国ミシガン州にあるカワサキロボット認定SIerのMidwest Engineered Systems (以下MWES社)が構築した「袋入り食品の箱詰め工程の自動化」を紹介します。MWES社は顧客の声に耳を傾け、高性能なカワサキロボットとソフトを使用した専用のパッケージセルを設計し、当初の目標を上回る結果を得ました。

導入背景/箱詰め作業での課題
●不安定な労働力により変動する生産体制
●幅広い製品種類と異なる箱サイズ(箱詰め作業の手間を削減)
●全設備稼働率85%で毎分50箱の処理が求められる
お客様は、労働力が確保できず生産体制が不安定になることから、箱詰め作業などの単純作業で人手に頼らない自動化ソリューションを求めていました。多品種かつ様々な箱サイズを処理できるコンパクトな可動式であることに加え、今後の事業成長に備えて機器構成の変更や機能拡張が可能なセルの希望がありました。
導入効果/ソリューション:
<過酷な調理作業の労力をロボットによる遠隔操作で軽減>
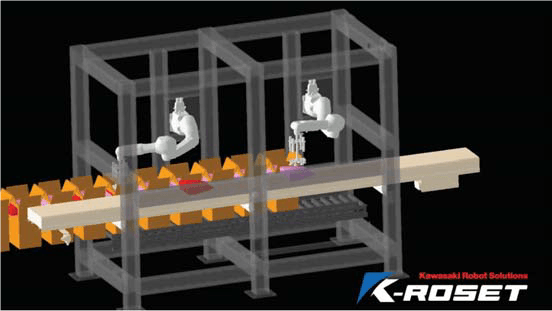
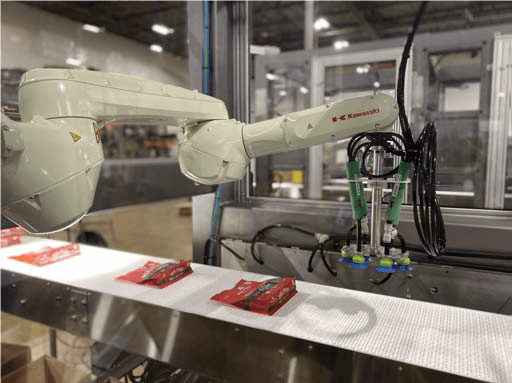
●2台の壁掛式の小型汎用ロボット「RS007L」が真空グリッパーで袋物製品をハンドリング
●コンベア・トラッキングとカワサキのビジョンソフト「K-VFinder」で製品を追跡
●異なる箱サイズと多品種製品を処理できる特別設計の可動式セル
お客様のニーズに合わせて、2台の小型汎用ロボット「RS007L」が真空グリッパーを用いて袋物製品をハンドリングするセルを構築しました。コンベアを流れてくる袋を川崎重工のビジョンシステム「K-VFinder」が認識しカメラで撮影します。ビジョンシステムのデータをコンベアトラッキングデータと共にロボットに送り、袋をピッキングする位置を決定します。ロボットは決められた位置で袋をピッキングし、隣のコンベア上に準備されている段ボールに箱詰めします。
システムの柔軟性
新しい製品を追加する場合は、オペレータが袋の寸法と重量、箱のサイズをHMI(ヒューマン・マシン・インターフェース)に入力して製品番号を割り当てるだけです。MWES社は、セル内のコンベアのレール幅を調整するため、ハンドクランクを設置しました。これにより、さまざまなサイズの箱に対応でき、お客様が求めていた柔軟性が実現しました。異なるサイズの製品の箱詰めに切り替える場合は、オペレータはHMIの製品番号を更新し、梱包したい製品幅に合うようにハンドクランクを回します。
セルは柔軟性に加えて、コンパクトなサイズであるため、フォークリフトで工場内の別の場所に移動することができます。セルは、電源・エア・Ethernetを接続するだけで、わずか1日で再立上げができます。MWES社のセールスエンジニア、Steve Phelps氏によると、これは成長を続けるメーカーにとって重要とのこと。「自動化に慣れたばかりの成長段階のメーカーでは、設備を定期的に施設内で移動させる必要があるため、このようなパッケージング(箱詰め)を提案しました。」
理想のロボット
MWES社がこのセルに小型汎用ロボットRS007Lを選んだ理由は、その優れた可動範囲、可搬質量、高速度性能です。7 kgの可搬質量、730 mmのリーチ、柔軟なオプション類や中空アーム構造は、このコンパクトなセルに最適です。アーム内部にビジョンケーブル、センサハーネス、空圧パイプなどを収納でき、周辺機器との干渉を防ぎつつ狭い設置スペースでの作業が可能となります。
箱詰め作業を自動化した結果
●製品の落下なしで毎分80袋の箱詰めが可能
●作業者を最大3人削減し、工場内の別作業に再配置
●コンパクトで汎用性があり柔軟性が高いシステムを実現
小型汎用ロボットRS007Lは、毎分80袋を落下することなく箱詰めすることができます。SIerのMWES社によれば、これはお客様が設定した処理能力と稼働率の目標を上回っており、このシステムの導入により、2~3人の従業員を各自のスキルに適した、より高いレベルの作業に再配置できました。

※ Sharma, Anisha.「製造業界は前例のない雇用不足に直面ープレスリリース」、デロイト米国、2019年4月7日
-導入ロボット
モデル名:
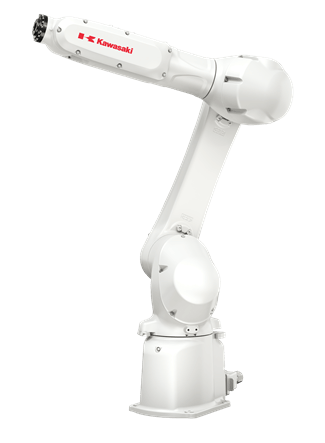
RS007L=設計のアーム構造や軽量化を実現したRSシリーズ中の次世代ロボット
特長
上部アームに片持ち梁構造を採用し、長いリーチと本体の下方・後方・近接部分に広い動作範囲を実現
可搬重量 :7kg
軸数 :6軸
繰り返し精度:±0.03㎜
プログラミングツール:K-ROSET
適用動画
関連製品
RS007L
最新設計のアーム構造や軽量化を実現したRSシリーズ中の次世代ロボット。
上部アームに片持ち梁構造を採用し、長いリーチと本体の下方・後方・近接部分に広い動作範囲を有し、クラス最高の速度と動作範囲を実現。
※設置方式:壁掛けはオプションです。