2015年に開発を開始して以降、さまざまなバージョンアップを繰り返してきた川崎重工のRobust Humanoid Platform(以下RHP)Kaleido。早期にKaleidoで培った技術を社会に還元するため、現在Kaleidoから派生した2つのロボット開発を進めています。それがスリム型ヒューマノイドロボット「Friends」と四脚歩行ロボット「Bex」。2つのロボット開発に踏み切った真意とは? 開発責任者である掃部 雅幸氏(工学博士)に聞きました。
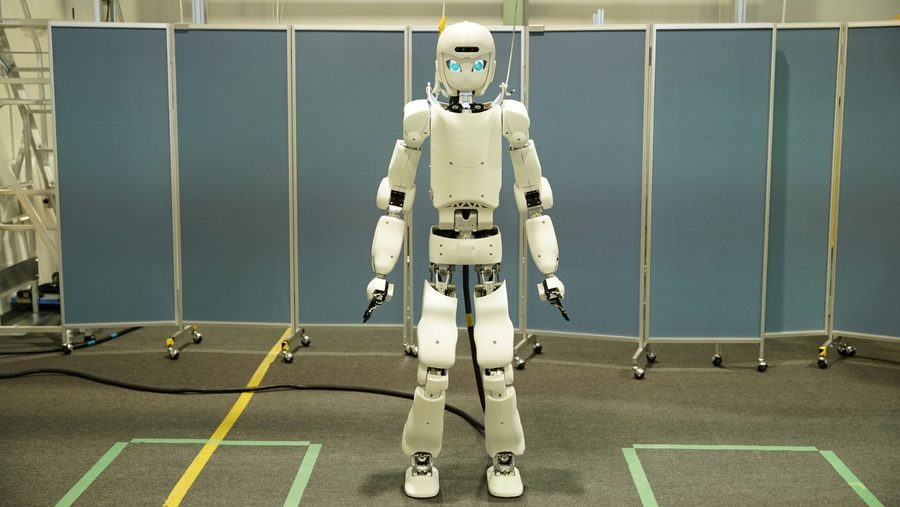
人共存型ヒューマノイドロボット「RHP Friends(以下Friends)」
ー 「RHP Friends」の開発に至った経緯を教えてください。
川崎重工では、産業技術総合研究所と日本のヒューマノイドロボットの技術向上のため共同研究を進めています。日本の産業に役立つヒューマノイドロボットとはどのようなものか。
私たちはKaleidoの社会実装例の1つとして災害救助の現場を想定していましたが、より早く社会実装につながる現場として工場も考えられます。工場の中でも量産品の製造ではなく、高付加価値の商品を組み立てるような作業。これにヒューマノイドロボットが利用できるのではないか。
そういった現場では現状、人が狭い場所で体をくねらせながら作業をしていたりします。また作業場所に辿り着くまでに細い通路を通らなくてならないこともあります。ただ、その作業自体はネジ締めのような地味で簡単な作業。そんな場合、作業だけ見れば人よりもロボットの方が得意です。
ただしそういった場所で作業するためにはヒューマノイドロボットは細い型でなくてはなりません。柔軟で、人と一緒に働くための安全な設計がされていて、万が一倒れても周囲の装置を壊さない。力はあるに越したことはないけれどそこまでは必要ない。そういったロボットであれば、飛行機のエンジンやガスタービン、化学プラントのような場所でも活躍する場があるはずです。
これまで、私たちが開発していたKaleidoが目指していたのは強靭さやパワーでした。そこで、細い機体で狭いところも通れる、かつ周囲の人から見ても優しいデザインのロボットを開発しようとしたことが、Friendsのプロジェクトのはじまりです。

ー KaleidoからFriendsへ受け継がれている点や、逆に異なる点を教えてください。
川崎重工の50年にわたる産業用ロボットのノウハウや設計思想は、もちろんKaleidoだけでなくFriendsにも受け継がれています。またKaleidoの設計技術も踏襲しています。
異なる点はまずスリム化です。そのために、高品質でかつ小さいモーターを使用して、軽量化しました。Kaleidoの重さが80kg程度あるのに対して、Friendsの重さは55kg程度。また小さいモーターだからFriendsの細い体にも入れることができます。身長もKaleidoが180cm程度なのに対して160cm程度と小柄です。
スリム化は目指さなくてはいけませんが、川崎重工は産業用ロボットメーカーとしての矜持があるからこそ、すぐに壊れるものは作れない。スリム化をしながらも産業用として使える品質を担保する、ぎりぎりのバランスを追求したのがFriendsです。
また、人と協働することを想定していますので、人が近づいたときに手を挟まないなど、人協働ロボットとしての考え方が導入されているのもFriendsの特長です。
ー デザインも周囲に怖さを感じさせないものになっていますね。
はい、そうですね。人と協働するときにという話ももちろんですが、今後、人間がロボットに求めるのは決して労働だけではないと考えています。
例えばAIが今後進化していったときに、AIと「この花きれいだね」なんて会話をしても、AI単体では一緒に出かけることはできません。
でもAI搭載のヒューマノイドロボットが人と一緒に生活する。そんなシーンがもしかしたら労働よりも早く訪れるのではないかとも思っています。外観や顔の表情など、人に受け入れられるということをFriendsではかなり意識をしています。

ー FriendsはiREX(2022国際ロボット展)で初披露されます。展示の見どころを教えてください。
介護現場での実用化を想定して、Friendsが車椅子を押して、高齢者の方とお話するというデモンストレーション。そして、Friendsがステージに登場して、歌いながら踊るエンターテイメントの演出を用意しています。
エンターテイメントのデモンストレーションでの技術的なポイントはモーションキャプチャの技術です。事前に人間が動いて見せると、その動きをロボットが再現するのです。
これまではパソコン上でプログラミングをすることで、ロボットを動かしていました。しかし、その作業が不要になり、直感的にティーチングを行うことができるようになります。今回はFriendsの動きを見ていただきたくてダンスを選びましたが、モーションキャプチャによるティーチングはさまざまな場面で利用可能です。
四脚歩行ロボット「RHP Bex(以下BEX)」
ー こちらも今回初披露になる「RHP Bex」。開発の経緯について教えてください。

私たちはKaleidoの開発を通じて、二足歩行ロボットの難しさを感じていました。ヒューマノイドロボットは人間と同じ形だからこそ、究極的には人ができることはすべてできる可能性がある、汎用性の高いものです。ただ、その実用化には長い期間がかかるでしょう。
一方で、私は、車輪で動く自走式サービスロボットのNyokkeyも開発していますが、約1年ほどで実証試験のフェーズまで至りました。短期間で開発することが出来ましたが、やはり不整地を移動するには車輪ではなく脚が適しています。そこで、ヒューマノイドロボットとNyokkeyのちょうど中間の領域。ここにもビジネスがあるのではないかと考えたのです。
そこで開発をはじめたのが四脚歩行ロボットのBexです。ヒューマノイドロボットの開発で培った歩行技術は四脚歩行ロボットにも必ず活かすことができると考えています。
ー Bexはどのようなシーンで利用されるのでしょうか。
まずは、建築現場で資材を運ぶなどの軽可搬を想定しています。100kg可搬を目標に現在開発を進めています。
あとは検査ですね。広大なプラントの中で、計器が今どのような状態か、Bexがぐるっと見回りをして、遠隔でカメラから映像を確認するという使い方もできます。農地で人が収穫した作物をBexが運ぶ、なんて使い方も可能です。
川崎重工は、このBexもヒューマノイドロボットの1つと位置づけて開発を進めています。四脚で歩くロボットは既に存在していますが、ヒューマノイドとして腕を持つ四脚ロボットは多くありません。ここに、ヒューマノイドロボット開発を続けてきた川崎重工が四脚ロボットに取り組む意義があると考えています。
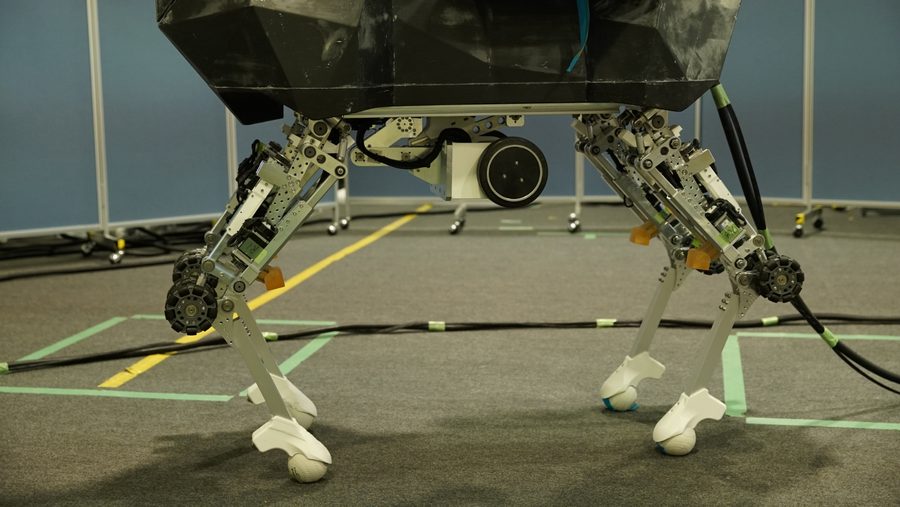
一方で、ベースはヒューマノイドロボットとしながらも、Bexの上半身は固定のものはなく用途に応じて適応していくことも考えています。建築現場ならば建築メーカーと、プラントならばプラントメーカーとパートナーシップを結び上半身はお任せする。川崎重工は下半身の四脚に注力していき、オープンイノベーションプラットフォームとして提供していきたいと考えています。
ー iREXでのBexの展示の見どころについてお聞かせください。
Kaleidoの体重が80kg。その80kgを支える2本の足が4本ついているわけですから、Bexは本来160kgを支えるポテンシャルを秘めています。そこでBexの上に人間が乗るというデモンストレーションを想定しています。iREXでは是非、Kaleidoだけでなく、兄妹であるFriendsと、Bexにも注目していただければと思います。